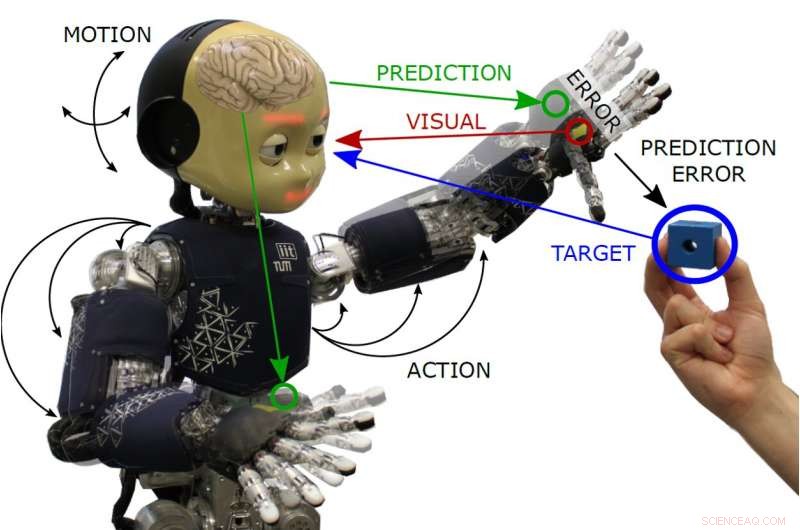
Kredit:Oliver, Lanillos och Cheng.
En viktig utmaning för robotforskare är att utveckla system som kan interagera med människor och deras omgivande miljö i situationer som innebär olika grad av osäkerhet. Faktiskt, medan människor kontinuerligt kan lära av sina erfarenheter och uppfatta sin kropp som en helhet när de interagerar med världen, robotar har ännu inte dessa möjligheter.
Forskare vid Münchens tekniska universitet har nyligen genomfört en ambitiös studie där de försökte tillämpa "aktiv slutledning, "en teoretisk konstruktion som beskriver förmågan att förena perception och handling, till en humanoid robot. Deras studie är en del av ett bredare EU-finansierat projekt kallat SELFCEPTION, som slår en bro mellan robotik och kognitiv psykologi med syftet att utveckla mer perceptiva robotar.
"Den ursprungliga forskningsfrågan som utlöste detta arbete var att ge humanoida robotar och artificiella agenter i allmänhet kapacitet att uppfatta sin kropp som människor gör, " Pablo Lanillos, en av forskarna som genomförde studien, berättade TechXplore. "Huvudmålet var att förbättra deras förmåga att interagera under osäkerhet. Under paraplyet av Selfception.eu Marie Skłodowska-Curie-projektet definierade vi initialt en färdplan för att inkludera vissa egenskaper hos mänsklig perception och handling i robotar."
I sin studie, Lanillos och hans kollegor försökte få en bättre förståelse av mänsklig perception och modellerade den sedan till en humanoid robot. Detta visade sig vara en mycket svår uppgift, så många detaljer om hur sensorisk information (visuell, taktil, etc.) bearbetas av människor är fortfarande okända. Forskarna hämtade inspiration från Hermann Von Helmholtz och Karl Fristons arbete, särskilt från deras teori om aktiv slutledning, som är bland de mest inflytelserika neurovetenskapliga konstruktionerna.
"I huvudsak, vi föreslår att roboten kontinuerligt närmar sig sin kropp med hjälp av sina ofullkomliga inlärda modeller, "Guillermo Oliver, en annan forskare involverad i studien, berättade TechXplore. "Algorithmen, baserad på principen om fri energi, presenterar perception och handling som arbetar för ett gemensamt mål:att minska prediktionsfelet. I detta tillvägagångssätt, åtgärd gör att sensoriska data bättre motsvarar den förutsägelse som den inre modellen gör."
Lanillos, Oliver och prof. Gordon Cheng var de första som tillämpade aktiv slutledning på en riktig robot. Faktiskt, än så länge, aktiv slutledning testades endast teoretiskt eller i simuleringar som delvis var partiska av förenklingen av de använda modellerna.
Deras tillvägagångssätt försöker reproducera människors förmåga att ändra sina handlingar (t.ex. deras gång) i särskilda situationer, till exempel, när de närmar sig en rulltrappa, men upptäcker plötsligt att den är trasig eller ur funktion, och anpassa sina rörelser därefter. Perceptions- och kontrollalgoritmen utvecklad av Lanillos, Oliver och Cheng replikerar en liknande mekanism i robotar.
Till exempel, i en räckande uppgift där en robot behöver röra ett föremål, modellen skapar ett fel i den önskade handpositionen som utlöser en åtgärd mot objektet. Jämvikten (eller minimeringen) uppnås när robotens hand och objektet är på samma plats.
"Det här tillvägagångssättet är sällsynt i robotsamhället, men ger följsamhet, tillåter kombination av sensorisk information från olika källor och tillåter inställning av tillförlitligheten för varje sensorinformation, beroende på precisionen, "Sa Oliver.
Forskarna tillämpade sin algoritm på iCub, en kognitiv humanoid robot med öppen källkod utvecklad som en del av ett annat EU-finansierat projekt, och utvärderade dess prestanda i uppgifter som involverade dubbelarmsräckning och aktiv huvudspårning. I sina tester, roboten kunde utföra avancerade och robusta räckviddsbeteenden, samt aktiv huvudspårning av föremål i dess synfält.
"Den humanoida roboten kunde utföra robusta räckviddsuppgifter med två armar och visuella spårningsuppgifter för ett objekt med samma matematiska modell, ", sa Oliver. "Med den här typen av algoritm, vi skulle vilja ändra den nuvarande synen på input-output perception pipeline (t.ex. state-of-the-art neurala nätverk) genom att genomdriva idén om close loop perception, där fram- och bakåtpassningar behandlas online, och inklusive handling som en annan oundviklig variabel."
Lanillos, Oliver och Cheng är de första att implementera en modell baserad på principen om fri energi på en riktig humanoid robot. Deras resultat tyder på att det är möjligt att validera sådana modeller i verkliga miljöer, liksom att analysera fördelarna med dessa modeller i närvaro av bullrig sensorisk information, ocklusioner eller när endast partiell information är tillgänglig. Forskarna planerar nu att tillämpa sin modell på andra robotar och testa dess generaliserbarhet.
"I längden, vi vill möjliggöra utvecklingen av artificiella medel med samma förmåga till kroppsanpassning och interaktion som människor, " sa Lanillos. "Under tiden, vi utvecklar nya bioinspirerade algoritmer för artificiell intelligens. I framtiden, vi kommer också att använda denna modell för att undersöka kroppsägande och byrå, och vem vet, vi kanske en dag möjliggör självigenkänning i maskiner."
© 2019 Science X Network