Detta forskningsresultat visar att robotar intuitivt kan läras att vara flexibla av människor, eftersom det inte åstadkoms genom numerisk beräkning eller programmering av robotens rörelser. Kredit:Korea Institute of Science and Technology (KIST)
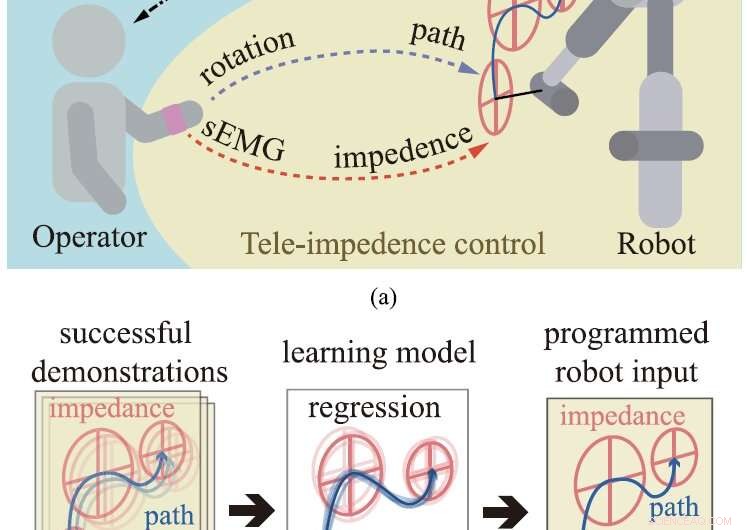
Dr Kee-hoon Kims team vid Center for Intelligent &Interactive Robotics vid Korea Institute of Science and Technology (KIST) utvecklade ett sätt att lära ut "impedanskontrollerade robotar" genom mänskliga demonstrationer med hjälp av ytelektromyogram (sEMG) av muskler, och lyckades lära en robot att fånga en tappad boll som en fotbollsspelare. Ett ytelektromyogram är en elektrisk signal som produceras under muskelaktivering som kan plockas upp på hudens yta.
Nyligen utvecklade impedanskontrollerade robotar har öppnat en ny era av robotik baserad på den naturliga elasticiteten hos mänskliga muskler och leder, som konventionella stela robotar saknar. Robotar med flexibla leder förväntas kunna köra, hoppa hinder och idrotta som människor. Dock, Tekniken som krävs för att lära sådana robotar att röra sig på detta sätt har varit otillgänglig förrän nyligen.
KIST-forskargruppen blev först i världen med att utveckla ett sätt att lära ut nya rörelser till impedansstyrda robotar med hjälp av mänskliga muskelsignaler. Med denna teknik, som upptäcker inte bara mänskliga rörelser utan även muskelsammandragningar genom sEMG, det har nu blivit möjligt för robotar att imitera rörelser baserade på mänskliga demonstrationer.
Dr Kee-hoon Kims team har lyckats använda sEMG för att lära en robot att snabbt och på ett smidigt sätt fånga en snabbt fallande boll innan den kommer i kontakt med en fast yta eller studsar för långt för att nå-liknande de färdigheter som används av fotbollsspelare.
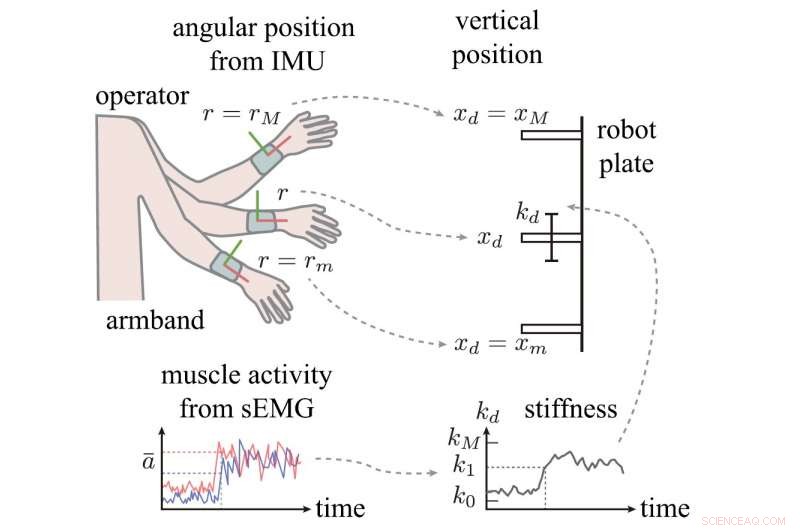
SEMG -sensorer fästes på en mans arm, så att han samtidigt kan kontrollera platsen och flexibiliteten för robotens snabba uppåt- och nedåtgående rörelser. Kredit:Korea Institute of Science and Technology (KIST)
SEMG-sensorer var fästa på en mans arm, så att han samtidigt kan kontrollera platsen och flexibiliteten för robotens snabba uppåt- och nedåtgående rörelser. Mannen "lärde" sedan roboten hur man fångar en snabbt fallande boll genom att ge en personlig demonstration. Efter att ha lärt sig rörelsen, roboten kunde skickligt fånga en tappad boll utan någon extern hjälp.
Detta forskningsresultat, som visar att robotar intuitivt kan läras att vara flexibla av människor, har väckt stor uppmärksamhet, eftersom det inte åstadkoms genom numerisk beräkning eller programmering av robotens rörelser. Denna studie förväntas hjälpa till att främja studien av interaktioner mellan människor och robotar, tar oss ett steg närmare en värld där robotar är en integrerad del av vårt dagliga liv.
Kim sa, "Resultatet av denna forskning, som fokuserar på att lära ut mänskliga färdigheter till robotar, är en viktig prestation i studiet av interaktioner mellan människor och robotar."
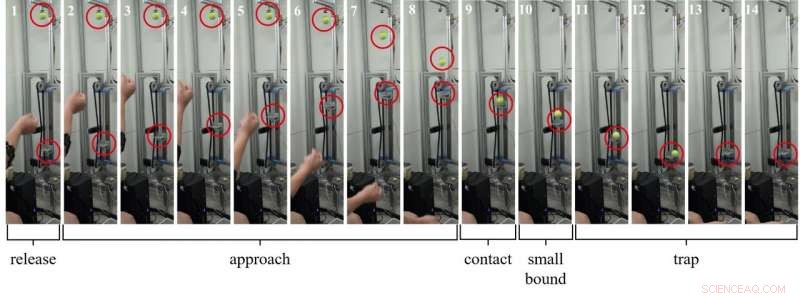
Demonstration av en robot för att fånga boll utan kodning. Kredit:Korea Institute of Science and Technology (KIST)