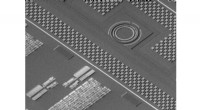
En mikroborst-bot visas bredvid en amerikansk penny för storleksjämförelse. Kredit:Allison Carter
Forskare har skapat en ny typ av liten 3-D-tryckt robot som rör sig genom att utnyttja vibrationer från piezoelektriska ställdon, ultraljudskällor eller till och med små högtalare. Svärmar av dessa "micro-borst-bots" kan arbeta tillsammans för att känna av miljöförändringar, flytta material — eller kanske en dag reparera skador inuti människokroppen.
Prototyprobotarna svarar på olika vibrationsfrekvenser beroende på deras konfigurationer, gör det möjligt för forskare att kontrollera enskilda robotar genom att justera vibrationen. Ungefär två millimeter långa – ungefär lika stora som världens minsta myra – kan botarna täcka fyra gånger sin egen längd på en sekund trots de fysiska begränsningarna av deras lilla storlek.
"Vi arbetar för att göra tekniken robust, och vi har många potentiella tillämpningar i åtanke, sa Azadeh Ansari, en biträdande professor vid School of Electrical and Computer Engineering vid Georgia Institute of Technology. "Vi arbetar i skärningspunkten mellan mekanik, elektronik, biologi och fysik. Det är ett mycket rikt område och det finns mycket utrymme för multidisciplinära koncept."
Ett papper som beskriver mikroborstbottarna har godkänts för publicering i Journal of Micromechanics and Microengineering . Forskningen stöddes av ett fröbidrag från Georgia Techs Institute for Electronics and Nanotechnology. Förutom Ansari, i forskargruppen ingår George W. Woodruff School of Mechanical Engineering Docent Jun Ueda och doktoranderna DeaGyu Kim och Zhijian (Chris) Hao.
Mikroborstbottarna består av ett piezoelektriskt manöverdon limmat på en polymerkropp som är 3D-tryckt med tvåfotonpolymerisationslitografi (TPP). Ställdonet genererar vibrationer och drivs externt eftersom inga batterier är tillräckligt små för att passa på boten. Vibrationerna kan också komma från en piezoelektrisk shaker under ytan som robotarna rör sig på, från en ultraljuds/ekolodskälla, eller till och med från en liten akustisk högtalare.
Vibrationerna flyttar de fjädrande benen upp och ner, driver mikroboten framåt. Varje robot kan designas för att svara på olika vibrationsfrekvenser beroende på benstorlek, diameter, design och övergripande geometri. Vibrationernas amplitud styr hastigheten med vilken mikrobotarna rör sig.
"När mikroborstrobotarna rör sig upp och ner, den vertikala rörelsen översätts till en riktad rörelse genom att optimera benens design, som ser ut som borst, " förklarade Ansari. "Benen på mikroroboten är designade med specifika vinklar som gör att de kan böjas och röra sig i en riktning som resonanssvar på vibrationen."

Närbildsfoto visar en mikroborst-bot, som är ungefär två millimeter lång – ungefär lika stor som världens minsta myra. Kredit:Allison Carter, Georgia Tech
Mikroborstbottarna är gjorda i en 3D-skrivare med hjälp av TPP-processen, en teknik som polymeriserar ett monomerhartsmaterial. När den del av hartsblocket som träffas av det ultravioletta ljuset har utvecklats kemiskt, resten kan tvättas bort, lämnar den önskade robotstrukturen.
"Det är att skriva snarare än traditionell litografi, " Ansari förklarade. "Du är kvar med strukturen som du skriver med en laser på hartsmaterialet. Processen tar nu ganska lång tid, så vi tittar på sätt att skala upp det för att göra hundratals eller tusentals mikrobotar åt gången."
Några av robotarna har fyra ben, medan andra har sex. Förstaförfattaren DeaGyu Kim gjorde hundratals av de små strukturerna för att bestämma den ideala konfigurationen.

En mikroborst-bot visas bredvid en amerikansk penny för storleksjämförelse. Kredit:Allison Carter
De piezoelektriska ställdonen, som använder materialet blyzirkonattitanat (PZT), vibrera när elektrisk spänning appliceras på dem. Baklänges, de kan också användas för att generera en spänning, när de vibreras, en förmåga som mikroborstbottarna kan använda för att slå på sensorer ombord när de påverkas av externa vibrationer.
Ansari och hennes team arbetar för att lägga till styrförmåga till robotarna genom att sammanfoga två lite olika mikroborstbottar. Eftersom var och en av de sammanfogade mikrobotarna skulle svara på olika vibrationsfrekvenser, kombinationen kan styras genom att variera frekvenser och amplituder. "När du har en fullt styrbar mikrorobot, du kan tänka dig att göra många intressanta saker, " Hon sa.
Andra forskare har arbetat med mikrorobotar som använder magnetfält för att producera rörelse, Ansari noterade. Även om det är användbart för att flytta hela svärmar på en gång, magnetiska krafter kan inte lätt användas för att adressera enskilda robotar inom en svärm. Mikroborstrobotarna som skapats av Ansari och hennes team tros vara de minsta robotarna som drivs av vibrationer.

Georgia Tech forskare Azadeh Ansari, DeaGyu Kim och Zhijian (Chris) Hao testar en mikroborst-bot i en kammare utformad för att innehålla ljudet från det piezoelektriska ställdonet. Kredit:Allison Carter, Georgia Tech
Mikroborstbottnarna är ungefär två millimeter långa, 1,8 millimeter bred och 0,8 millimeter tjock, och väger cirka fem milligram. 3D-skrivaren kan producera mindre robotar, men med en reducerad massa, vidhäftningskrafterna mellan de små enheterna och en yta kan bli mycket stora. Ibland, mikrobottarna kan inte separeras från pincetten som används för att plocka upp dem.
Ansari och hennes team har byggt en "lekplats" där flera mikrobotar kan röra sig när forskarna lär sig mer om vad de kan göra. De är också intresserade av att utveckla mikrobotar som kan hoppa och simma.
"Vi kan titta på myrors kollektiva beteende, till exempel, och tillämpa det vi lär oss av dem på våra små robotar, ", tillade hon. "Dessa mikroborstrobotar går fint i en laboratoriemiljö, men det är mycket mer vi måste göra innan de kan gå ut i omvärlden."