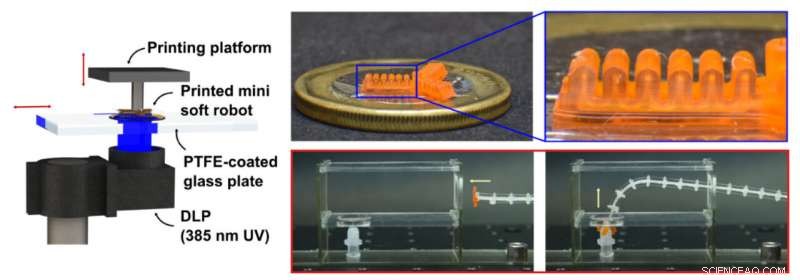
Ett generiskt processflöde föreslås för att styra 3D -utskrift av miniatyrmjuka pneumatiska ställdon som är mindre än ett mynt. En mjuk skräpborttagare med en integrerad miniatyrgrepp kan förverkliga navigering genom ett trångt utrymme och samla små föremål i svåråtkomliga positioner. Kredit:SUTD
Mjuka robotar är en klass av robotsystem gjorda av kompatibla material och kan säkert anpassas till komplexa miljöer. De har sett snabb tillväxt nyligen och finns i en mängd olika mönster som spänner över skalor med flera längder, från mätare till submikrometrar.
Särskilt, små mjuka robotar i millimeterskala är av praktiskt intresse eftersom de kan utformas som en kombination av miniatyrmanövreringsorgan som helt enkelt drivs av pneumatiskt tryck. De är också väl lämpade för navigering i trånga områden och manipulation av små föremål.
Dock, att skala ner mjuka pneumatiska robotar till millimeter resulterar i finare funktioner som reduceras med mer än en storleksordning. Designkomplexiteten hos sådana robotar kräver stor känslighet när de tillverkas med traditionella processer som formning och mjuk litografi. Även om nya 3D-utskriftstekniker som digital ljusbehandling (DLP) erbjuder höga teoretiska upplösningar, hantering av mikroskala tomrum och kanaler utan att orsaka igensättning har fortfarande varit utmanande. Verkligen, framgångsrika exempel på 3D-tryckning av miniatyrmjuka pneumatiska robotar är sällsynta.
Nyligen, forskare från Singapore och Kina, nämligen från Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) och Zhejiang University (ZJU), föreslog ett generellt processflöde för att styra DLP 3-D-utskrifter av miniatyr pneumatiska ställdon för mjuka robotar med en total storlek på 2-15 mm och en storlek på 150-350 μm (se bilden). Deras forskning publicerades i Avancerad materialteknik .
"Vi utnyttjade den höga effektiviteten och upplösningen för DLP 3D-utskrift för att tillverka miniatyrmjuka robotaktuatorer, "säger docent Qi (Kevin) Ge från SUSTech, ledande forskare av forskningsprojektet. "För att säkerställa pålitlig utskriftstrohet och mekanisk prestanda i de tryckta produkterna, vi introducerade ett nytt paradigm för systematisk och effektiv skräddarsy av materialformulering och viktiga bearbetningsparametrar. "
Vid DLP 3-D-utskrift, fotoabsorbenter läggs vanligtvis till polymerlösningar för att förbättra utskriftsupplösningarna i både laterala och vertikala riktningar. Under tiden, alltför hög dos leder till snabb nedbrytning av materialets elasticitet, vilket är avgörande för mjuka robotar för att upprätthålla stora deformationer.
"För att uppnå en rimlig avvägning, vi valde först en fotoabsorberare med god absorbans vid det projicerade UV-ljusets våglängd och bestämde lämplig materialformulering baserat på mekaniska prestandatester. Nästa, vi kännetecknade härdningsdjupet och XY -trovärdigheten för att identifiera den lämpliga kombinationen av exponeringstid och skivad tjocklek, "förklarade den första författaren Yuan-Fang Zhang från SUTD.
"Genom att följa detta processflöde, vi kan producera ett sortiment av miniatyrmjuka pneumatiska robotaktuatorer med olika strukturer och morphing -lägen, alla mindre än ett mynt i Singapore dollar, på ett självbyggt multimaterial 3D-utskriftssystem. Samma metodik bör vara kompatibel med kommersiell stereolitografi (SLA) eller DLP 3-D-skrivare eftersom ingen hårdvaruändring krävs, "sade motsvarande författare professor Qi Ge från SUSTech.
För att exemplifiera de potentiella tillämpningarna, forskarna utvecklade också en mjuk skräpborttagare som består av en kontinuummanipulator och en 3D-tryckt miniatyr mjuk pneumatisk gripare. Den kan navigera genom ett begränsat utrymme och samla små föremål i svåråtkomliga positioner.
Det föreslagna tillvägagångssättet banar väg för 3D-utskrift av miniatyrmjuka robotar med komplexa geometrier och sofistikerade multimaterialdesigner. Denna integration av tryckta miniatyrmjuka pneumatiska ställdon i ett robotsystem erbjuder möjligheter för potentiella tillämpningar som jetmotorunderhåll och minimalt invasiv kirurgi.














