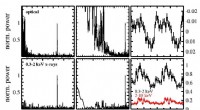
Omkring 100 samtidiga proton -proton -kollisioner i en händelse registrerad av CMS -experimentet. Upphovsman:Thomas McCauley/CMS/CERN
Med cirka en miljard proton -proton -kollisioner per sekund vid Large Hadron Collider (LHC), LHC -experimenten måste snabbt söka igenom mängden data för att välja vilka kollisioner som ska analyseras. För att klara ett ännu högre antal kollisioner per sekund i framtiden, forskare undersöker beräkningsmetoder som maskininlärningstekniker. Ett nytt samarbete undersöker nu hur dessa tekniker som används på marker som kallas fältprogrammerbara grindmatriser (FPGA) kan gälla för autonom körning, så att det snabba beslutsfattandet som används vid partikelkollisioner kan hjälpa till att förhindra kollisioner på vägen.
FPGA har använts på CERN i många år och för många applikationer. Till skillnad från den centrala processorenheten på en bärbar dator, dessa marker följer enkla instruktioner och bearbetar många parallella uppgifter samtidigt. Med upp till 100 höghastighets seriella länkar, de kan stödja ingångar och utgångar med hög bandbredd. Deras parallella bearbetning och omprogrammerbarhet gör dem lämpliga för applikationer för maskininlärning.
Utmaningen, dock, har varit att passa in komplexa djupinlärningsalgoritmer-en särskild klass av maskininlärningsalgoritmer-i chips med begränsad kapacitet. Detta krävde mjukvara som utvecklats för de CERN-baserade experimenten, kallas "hls4ml, "som reducerar algoritmerna och producerar FPGA-klar kod utan förlust av noggrannhet eller prestanda, så att chipsen kan utföra beslutsalgoritmer på mikrosekunder.
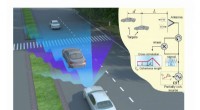
Ett nytt samarbete mellan CERN och Zenuity, det autonoma körprogramvaruföretaget med huvudkontor i Sverige, planerar att använda teknikerna och mjukvaran som utvecklats för experimenten vid CERN för att undersöka deras användning för att använda djupinlärning på FPGA, en särskild klass av maskininlärningsalgoritmer, för autonom körning. Istället för partikelfysikdata, FPGA:erna kommer att användas för att tolka enorma mängder data som genereras av normala körförhållanden, med hjälp av avläsningar från bilsensorer för att identifiera fotgängare och fordon. Tekniken bör göra det möjligt för automatiserade drivbilar att göra snabbare och bättre beslut och förutsägelser, på så sätt undviker trafikolyckor.

Ett FPGA-baserat avläsningskort för CMS-spåraren. Upphovsman:John Coughlan/CMS/CERN