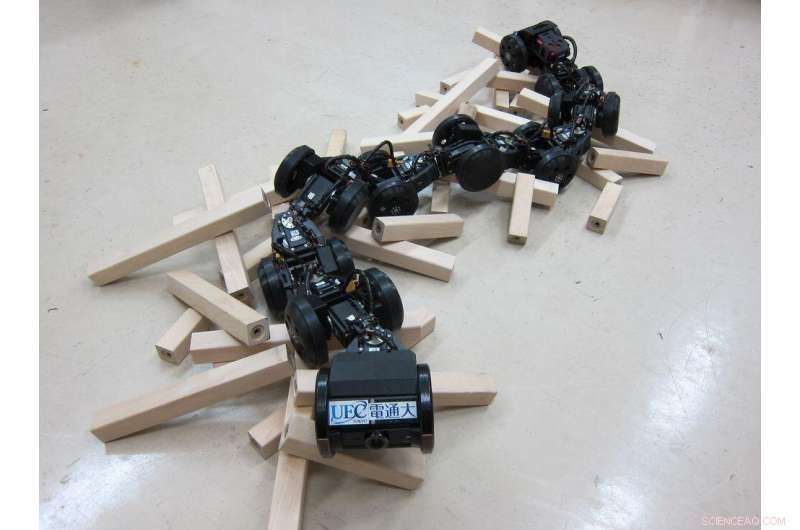
Den ormliknande roboten T 2 Snake-3. Kredit:University of Electro Communications
Ormliknande ledade mobila robotar kan komma in i trånga utrymmen och klättra på hinder med sina långa och tunna kroppar, och är effektiva för inspektion av trånga utrymmen och sök- och räddningsoperationer på katastrofplatser. Dock, det är svårt att kontrollera deras exakta rörelser eftersom de har så många ställdon.
Nu, Motoyasu Tanaka och kollegor vid University of Electrocommunications Tokyo, föreslå metoder för att styra ormliknande robotar för tredimensionell styrning, klättra i trappor och manipulera föremål, och har utvecklat den ormliknande roboten T 2 Snake-3. Vid tredimensionell styrning, roboten följer den omgivande terrängen genom att slappna av i lederna, och fortsätter sedan att röra sig från robotens ställning. Föraren kan enkelt styra och flytta roboten i ojämn terräng med denna metod. För att gå i trappor, roboten förskjuter autonomt sin rörelse i trappor från huvud till svans vid lämplig tidpunkt eftersom data från sensorer fästa på robotens botten används för att utlösa rörelsen. För att manipulera ett föremål, positionen och orienteringen av griparen som är fäst på robotens huvud styrs genom att hålla rätt hållning genom att autonomt välja fördelningen av de lyfta/jordade hjulen. Även om roboten T 2 Snake-3 har cirka trettio ställdon, operatören kan enkelt styra roboten genom att använda dessa metoder och en gamepad.
Roboten T 2 Snake-3 gick in i trånga utrymmen, klättra ett meter högt trappsteg, gå i trappor, och roterande ventiler genom att använda de föreslagna metoderna. Den ormliknande roboten styrdes effektivt för inspektionsutrustning och katastrofinsatser.