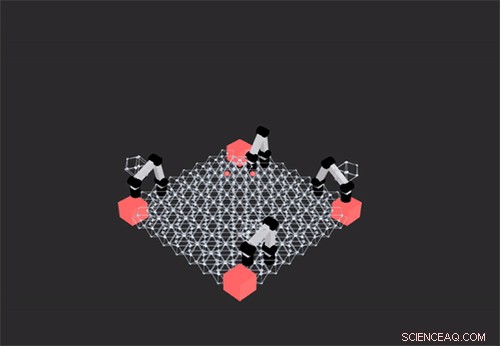
Datorsimulering visar en grupp av fyra assemblerrobotar som arbetar med att bygga en tredimensionell struktur. Hela svärmar av sådana robotar skulle kunna släppas lös för att skapa stora strukturer som flygplansvingar eller rymdmiljöer. Kredit:Massachusetts Institute of Technology
Dagens kommersiella flygplan tillverkas vanligtvis i sektioner, ofta på olika platser – vingar på en fabrik, flygkroppssektioner vid en annan, svanskomponenter någon annanstans — och sedan flögs till en central fabrik i enorma lastplan för slutmontering.
Men tänk om slutförsamlingen var den enda församlingen, med hela planet byggt av en stor samling små identiska bitar, alla tillsammans av en armé av små robotar?
Det är visionen som doktoranden Benjamin Jenett, arbetar med professor Neil Gershenfeld i MIT:s Center for Bits and Atoms (CBA), har bedrivit sin doktorsavhandling. Det har nu nått den punkten att prototypversioner av sådana robotar kan montera små strukturer och till och med arbeta tillsammans som ett team för att bygga upp en större sammansättning.
Det nya verket visas i oktobernumret av IEEE Robotics and Automation Letters, i en tidning av Jenett, Gershenfeld, doktorand Amira Abdel-Rahman, och CBA alumn Kenneth Cheung SM '07, Ph.D. '12, som nu är på NASA:s Ames Research Center, där han leder ARMADAS-projektet för att designa en månbas som skulle kunna byggas med robotmontering.
"Denna tidning är en njutning, " säger Aaron Becker, en docent i el- och datorteknik vid University of Houston, som inte var förknippad med detta arbete. "Den kombinerar förstklassig mekanisk design med imponerande demonstrationer, ny robothårdvara, och en simuleringssvit med över 100, 000 element, " han säger.
Kredit:Massachusetts Institute of Technology
"Vad som är kärnan i detta är en ny typ av robotik, som vi kallar relativa robotar, " säger Gershenfeld. Historiskt sett, han förklarar, det har funnits två breda kategorier av robotik – en gjord av dyra anpassade komponenter som noggrant är optimerade för särskilda applikationer som fabriksmontering, och sådana som är gjorda av billiga massproducerade moduler med mycket lägre prestanda. De nya robotarna, dock, är ett alternativ till båda. De är mycket enklare än de förra, medan mycket mer kapabel än den senare, och de har potential att revolutionera produktionen av storskaliga system, från flygplan till broar till hela byggnader.
Enligt Gershenfeld, den viktigaste skillnaden ligger i förhållandet mellan robotenheten och materialen som den hanterar och manipulerar. Med dessa nya typer av robotar, "Du kan inte separera roboten från strukturen - de arbetar tillsammans som ett system, "säger han. Till exempel, medan de flesta mobila robotar kräver mycket exakta navigationssystem för att hålla reda på sin position, de nya assemblerrobotarna behöver bara hålla reda på var de är i förhållande till de små underenheterna, kallas voxels, som de arbetar med just nu. Varje gång roboten tar ett steg in på nästa voxel, den justerar sin positionskänsla, alltid i förhållande till de specifika komponenter som den står på för tillfället.
Den underliggande visionen är att precis som de mest komplexa bilder kan reproduceras genom att använda en rad pixlar på en skärm, praktiskt taget alla fysiska objekt kan återskapas som en samling av mindre tredimensionella delar, eller voxlar, som själva kan utgöras av enkla stöttor och noder. Teamet har visat att dessa enkla komponenter kan arrangeras för att fördela laster effektivt; de består till stor del av öppet utrymme så att den totala vikten av strukturen minimeras. Enheterna kan plockas upp och placeras bredvid varandra av de enkla montörerna, och sedan fästa ihop med hjälp av låssystem inbyggda i varje voxel.
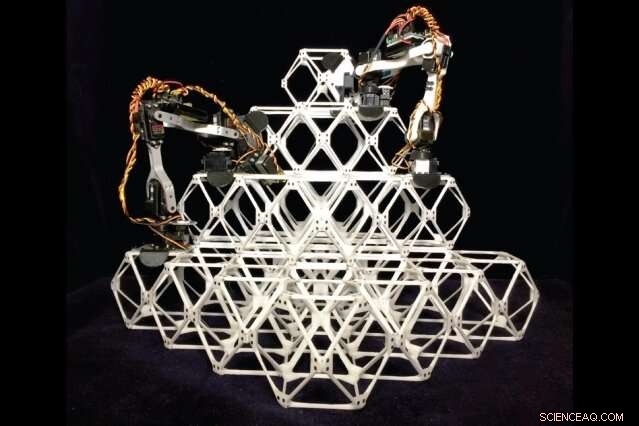
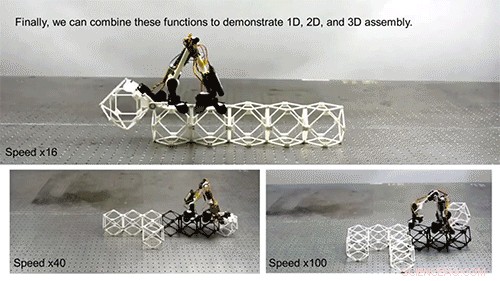
Bilden visar två prototyper av assemblerrobotar i arbete som sätter ihop en serie små enheter, känd som voxels, till en större struktur. Upphovsman:Benjamin Jenett
Robotarna själva liknar en liten arm, med två långa segment som är gångjärnsförsedda i mitten, och anordningar för att klämma fast på voxelstrukturerna på varje ände. De enkla enheterna rör sig som tummaskar, avancera längs en rad av voxlar genom att upprepade gånger öppna och stänga deras V-formade kroppar för att flytta från en till nästa. Jenett har döpt de små robotarna till BILL-E (en nick till filmroboten WALL-E), som står för Bipedal Isotropic Lattice Locomoting Explorer.
Jenett har byggt flera versioner av montörerna som proof-of-concept-designer, tillsammans med motsvarande voxeldesigner med spärrmekanismer för att enkelt fästa eller ta loss var och en från sina grannar. Han har använt dessa prototyper för att demonstrera monteringen av blocken till linjära, tvådimensionell, och tredimensionella strukturer. "Vi lägger inte precisionen i roboten, precisionen kommer från strukturen" när den gradvis tar form, säger Jenett. "Det skiljer sig från alla andra robotar. Den behöver bara veta var nästa steg är."
När det fungerar med att montera delarna, var och en av de små robotarna kan räkna sina steg över strukturen, säger Gershenfeld, som är chef för CBA. Tillsammans med navigering, detta låter robotarna korrigera fel vid varje steg, eliminera det mesta av komplexiteten hos typiska robotsystem, han säger. "Det saknar de flesta vanliga styrsystemen, men så länge den inte missar ett steg, den vet var den är. "För praktiska monteringsapplikationer, svärmar av sådana enheter kan arbeta tillsammans för att påskynda processen, tack vare styrmjukvara utvecklad av Abdel-Rahman som kan låta robotarna samordna sitt arbete och undvika att komma i vägen för varandra.
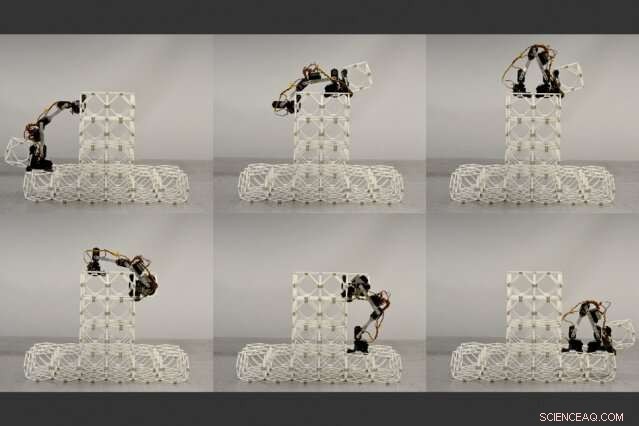
Sekvens av bilder visar en monteringsrobot på jobbet, bära en strukturell enhet över toppen och ner på den andra sidan av en struktur under uppbyggnad. Upphovsman:Benjamin Jenett
Denna typ av montering av stora strukturer från identiska underenheter med hjälp av ett enkelt robotsystem, ungefär som ett barn som sätter ihop ett stort slott av LEGO-klossar, har redan väckt intresse från några stora potentiella användare, inklusive NASA, MIT:s samarbetspartner i denna forskning, och det europeiska flygföretaget Airbus SE, som också hjälpte till att sponsra studien.
En fördel med en sådan montering är att reparationer och underhåll enkelt kan hanteras med samma typ av robotprocess som den initiala monteringen. Skadade sektioner kan tas isär från strukturen och ersättas med nya, producerar en struktur som är lika robust som originalet. "Att bygga upp är lika viktigt som att bygga, " Gershenfeld säger, och denna process kan också användas för att göra ändringar eller förbättringar av systemet över tid.
"För en rymdstation eller en månmiljö, dessa robotar skulle leva på strukturen, kontinuerligt underhålla och reparera det, säger Jenett.
I sista hand, sådana system skulle kunna användas för att bygga hela byggnader, speciellt i svåra miljöer som i rymden, eller på månen eller Mars, säger Gershenfeld. Detta skulle kunna eliminera behovet av att skicka stora förmonterade strukturer hela vägen från jorden. Istället skulle det kunna vara möjligt att skicka stora partier av de små underenheterna – eller bilda dem från lokalt material med hjälp av system som kan veva ut dessa underenheter vid deras slutdestination. "Om du kan göra en jumbojet, du kan bygga en byggnad, " säger Gershenfeld.
Sandor Fekete, direktör för Institutet för operativsystem och datornät vid tekniska universitetet i Braunschweig, i Tyskland, som inte var involverad i detta arbete, säger "Ultralight, digitala material som [dessa] öppnar fantastiska perspektiv för att konstruera effektiva, komplex, storskaliga strukturer, som är av avgörande betydelse för flygtillämpningar."
Men att montera sådana system är en utmaning, säger Fekete, som planerar att gå med i forskargruppen för vidareutveckling av kontrollsystemen. "Det är här användningen av små och enkla robotar lovar att ge nästa genombrott:Robotar blir inte trötta eller uttråkade, och att använda många miniatyrrobotar verkar vara det enda sättet att få detta kritiska jobb gjort. Detta extremt originella och smarta verk av Ben Jennet och medarbetare gör ett stort steg mot konstruktionen av dynamiskt justerbara flygplansvingar, enorma solsegel eller till och med omkonfigurerbara rymdmiljöer."
I processen, Gershenfeld säger, "vi känner att vi avslöjar ett nytt område av hybridmaterial-robotsystem."
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.