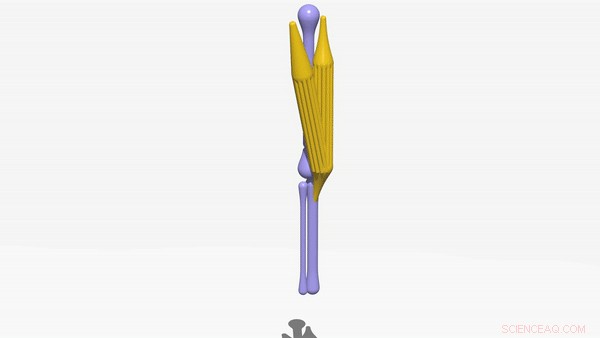
Simuleringsresultat av en armbåge som utför isokinetisk ledflexion. Humerus, ulna och radie är modellerade med styva trådar i lila. Senorna är modellerade med avsmalnande trådar i gult. Två bicepshuvuden bestående av 36 filament utför maximal frivillig kontraktion. Gränsförhållanden tillämpas för att säkerställa en konstant vinkelhastighet. Upphovsman:Nature Communications, doi:10.1038/s41467-019-12759-5
Livsforskare och bioingenjörer studerar naturliga system och organismer för att förstå deras biofysiska mekanismer, för att driva biomimetiska tekniska applikationer i labbet. I en ny rapport om Naturkommunikation , Xiaotian Zhang och kollegor vid avdelningarna för maskinteknik och applikationer för superdatorer i USA presenterade ett numeriskt tillvägagångssätt för att simulera muskuloskeletala arkitekturer. Metoden förlitade sig på montering av heterogena aktiva och passiva Cosserat-stavar (en deformerbart riktad stångbaserad kurva) i dynamiska strukturer för att modellera ben, senor, ledband, muskler och fibrer. De demonstrerade tillämpningar av tekniken genom att lösa en rad problem i biologiska och mjuka robotscenarier i många miljöer och skalor. Teamet konstruerade biohybridrobotar i millimeterskala och rekonstruerade komplexa muskuloskeletala system. Metoden är mångsidig och erbjuder ett ramverk för att hjälpa framåt och bakåt konstruktion av bioingenjörer för grundläggande upptäckter om levande organismer.
Muskuloskeletala system innehåller ben, muskler, senor och ligament för att fungera tillsammans i inhemska biologiska system. Intressant nog, sådana arkitekturer innehåller en oskiljaktig koppling mellan aktivering och kontroll, topologi och mekanik på grund av olinjära beståndsdelar. I stark kontrast med robusta karossrobotar, mjuka biologiska varelser kan genomföra deformationer och strukturella instabiliteter för att fungera inom komplexa, ostrukturerade och dynamiska miljöer. Biologiska muskuloskeletala arkitekturer har en inneboende fördelning, mjukhet och efterlevnad för att lägga ut kontrolluppgifter till en mängd olika fack. Den här egenskapen utgör grunden för ett framväxande paradigm inom biologiskt inspirerad robotik som kallas morfologisk beräkning eller mekanisk intelligens. Övervägandena har lett till en mängd experimentella framsteg inom mjuk robotik med konstgjorda material för att bilda mjuka biohybridrobotar. Trots experimentella framsteg inom området, ansträngningar att modellera och simulera dynamiska muskuloskeletala arkitekturer över biologiska och syntetiska strukturer återstår att åstadkomma.
Simulera den mänskliga armbågen
Zhang et al. demonstrerade först en metod för att inkludera fullständig deformationsdynamik som böjning, vrida, skjuvning och sträckning involverad i biologiska arkitekturer. För detta, de byggde vidare på tidigare arbete med cosserat -stavar för att upprätta ett muskuloskeletalt modelleringssätt för att realistiskt simulera aktiva, heterogena biologiska layouter i ett stegvis tillvägagångssätt för att syntetisera och replikera levande arkitekturer med biologiska lager av komplexitet för avancerade biomimetiska applikationer. Arbetet tillät dem att replikera biologiska system genom att efterlikna den underliggande biomekaniken och gav tillgång till studier och förstå biofysiska funktioner hos biologiska organismer i kisel. Studien visade att stavmodellernas tillämpningar spelade en värdefull roll när de modellerade komplexa aktiva system för biomimetiska arkitekturer.
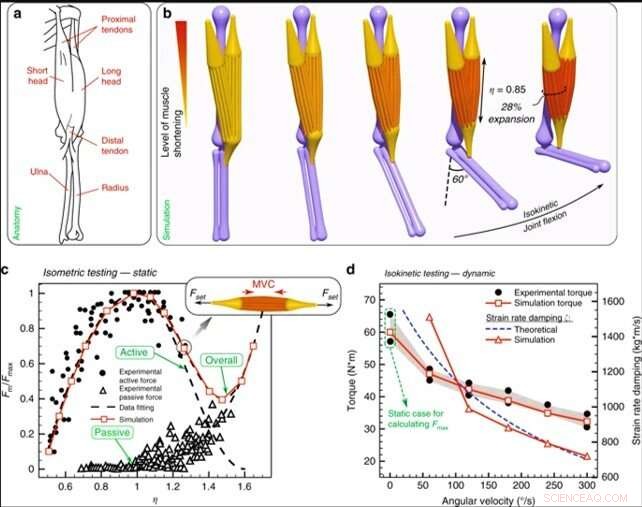
Mänsklig armbåge aktivering. (a) Armbågens anatomi. (b) Simulering av en armbåge bestående av tre ben (humerus, ulna och radie) och två bicepshuvuden (kort och långt huvud) som utför en fullständig böjning. (c) Experimentella data och simuleringar för aktiv och passiv kraft normaliserad med toppkraft (Fm/Fmax) under den isometriska övningen (Fset härmar motståndet som muskeln möter och resulterar i dess jämviktslängd η). (d) Experimentella och simulerade vridmomentmätningar av armbågsleden (vinklad vid 60 °) som utför maximal isokinetisk koncentrisk flexion vid olika vinkelhastigheter tillsammans med motsvarande övergripande dämpning av muskelspänning ζ. De numeriskt bestämda ζ jämförs sedan med teoretiska uppskattningar baserade på Hill -modellen. Upphovsman:Nature Communications, doi:10.1038/s41467-019-12759-5
Under den första biomimetiska simuleringen Zhang et al. använde en mänsklig armbåge med muskler, senor och ben för att illustrera stavaggregat som är kartlagda till fysiologi, dynamik och morfologi. Till exempel, armbågsleden visade mjuka och styva egenskaper, förenklad dynamik och minskat konfigurationsutrymme. Analysen gjorde det möjligt för dem att verifiera och kalibrera modellen baserat på lättillgängliga anatomiska och biomekaniska data för att relatera till Hill -modellen. Representationens detaljeringsnivå tillät dem att möta mänskliga patientspecifika kinesiologiska behov och praktiskt taget rekonstruera en 3D-kopia av en mänsklig armbåge med hjälp av isometriska och isokinetiska tester som är tillämpliga för benvävnadsteknik. Forskarna kunde modellera, kalibrera och validera en individuell muskelenhets aktivering, där resultatet reproducerade dynamik och morfologi för ett biologiskt system. Den nuvarande modelleringsmetoden presenterade viktiga funktioner som skiljer den från Hill -modellen, att inkludera (a) enskilda stavar för selektiv rekrytering för att efterlikna en skada, och (b) kompatibla muskler som kan böjas, vrida och klippa realistiskt till dynamiska krafter över hela strukturen eller inom miljön.
Tekniska biohybridrobotar
I nästa experiment, teamet konstruerade biohybridrobotar med sin beräkningslösare för att styra design och tillverkning av simning och promenader biohybridbots i millimeterskala. För att undersöka robotarnas simbeteende, de löste först problem med hjälp av numerisk modellering och simuleringar av en tidigare etablerad bio-hybrid flagella. För detta, de skapade en exakt kopia av den ursprungliga simmaren och modellerade polydimetylsiloxan (PDMS) -substrat för att efterlikna experimentell geometri och materialegenskaper med levande grupperade celler modellerade som en liten, mjuk och kontraktil filament ansluten till substratet. De kvalitativa och kvantitativa observationerna av simrörelse mellan simuleringen och experimentet passade bra.
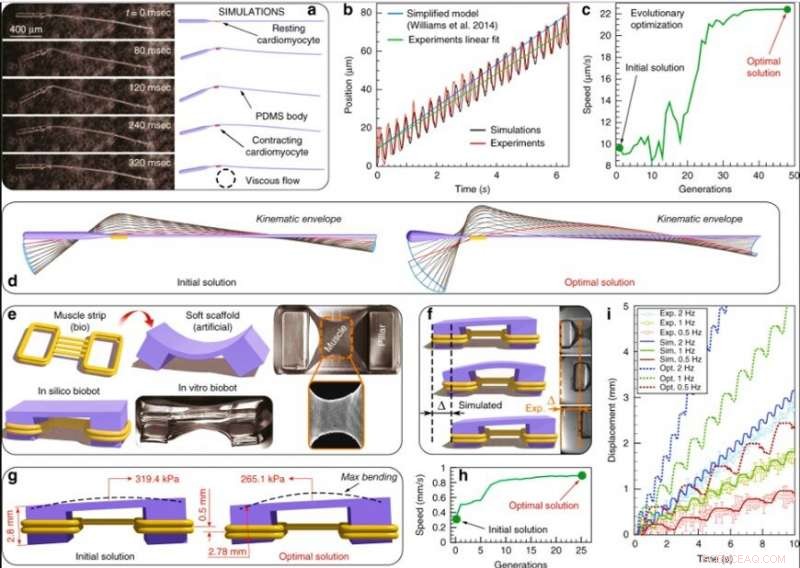
Bio-hybrid robotdesign. (a) En-till-en-jämförelse av roboten med experimentella fotografier i olika stadier inom en simcykel. (b) Axial position för robotens centrum övervakas över mer än 20 cykler jämfört med experimentella data. (c) Optimeringskurs:Konvergens till optimal lösning observeras efter 48 generationer. Optimeringen begränsades med huvudlängden inom [0, 1.927] mm, huvudradie inom [4, 40] μm, svansradie inom [4, 6,5] μm och cellplats vid valfri punkt längs svansen. Botens längdmått är fixerat till L =1,927 mm, så att svanslängden kan härledas från huvudlängden. Parameterintervallen bestäms för att ta hänsyn till den faktiska tillverkbarheten. (d) Visualisering av både original och optimal design som visar konfigurationer vid vila och mittlinje kinematiska kuvert över en period. Original simmardetaljer:substratet är modellerat med 424 μm långt huvud och 1503 μm lång svans med radier 20μm respektive 7μm. Densitet ρ =0,965 gcm − 3, Youngs modul E =3,86MPa, böjstyvhet EI =2,427 × 10−9Nmm2, massa m =7.364 × 10−7g är inställda. Kontraktilcellen är modellerad med radie 10μm och längd 100μm. Cellen är inställd på att producera en sammandragande kraft F =σmA =12μN med slagfrekvens f =3,6Hz23. Vätskan har dynamisk viskositet μ =1,2 × 10−3Pa⋅s. Optimerade simmardetaljer:substratet har en längd och radie på 190μm och 32,3μm, respektive. Den kontraktila cellen är fäst 190μm från huvudet och svansen är 4,3μm tjock. (e) Övergripande utformning av rullatorn med gula element som representerar muskelringar och lila element som representerar skelettet. Experimentella bilder anpassade från tidigare studier. (f) Simuleringar kontra experiment:Botförskjutning över 2 sekunder för aktiveringsfrekvensen 1 Hz. (g) Visualisering av den första och optimerade konstruktionen av rullatorn. (h) Optimeringskurs konvergerar efter 25 generationer. Optimeringen begränsades med skelettets Young's modul [250–350] kPa, längden på den kortare pelaren [2,4–3,4] mm och platsen för muskelremsan [0,5–3] mm (avstånd från marken), alla är valda enligt tillverkningsbarhet. (i) Dynamiskt beteende hos simulerade (heldragna linjer) och experimentella (markörer med felstänger) rullator med muskelsammandragning vid olika frekvenser, och jämförelse av gångprestanda mellan initiala (heldragna linjer) och ytterligare optimerad design (streckade linjer). Upphovsman:Nature Communications, doi:10.1038/s41467-019-12759-5
Efter modellering och optimering av biohybridsimmaren, de försökte beräkningsmässigt designa en biohybrid rullator som utvecklats tidigare för att bilda den snabbaste rörliga biologiska maskinen hittills av Pagan-Diaz et al., baserat på en föregående bio-hybrid robot. Strukturellt, modellen Pagan-Diaz innehöll en asymmetrisk hydrogelställning och skelettmuskelvävnader som liknade muskel-sen-ben-relationer in vivo och opererades i ett lösningsbad i labbet. Experimentellt, de hängde upp musklerna och chockade dem elektriskt för att framkalla sammandragning för rörelse via asymmetri och friktion.
Zhang et al. simulerade denna arkitektur i det nuvarande arbetet, att designa en ny ställning och topologiska muskelarrangemang av botten. Den nya muskelvävnadstopologin innehöll en tunn remseavdelning som förbinder två ringar lindade runt skelettbenen för att överföra muskelkontraktionskrafter, som de testade med benchmarkstudier. Zhang et al. experimentellt visat beräkningsplanen med Pagan-Diaz-modellen för att konstruera en ny biobot med dubbelt så hög hastighet som den ursprungliga bio-hybridroboten; med god överensstämmelse observerad i simuleringen. Forskargruppen visade potential i beräkningsmetoden för att inkapsla fysik i cell- och muskeldrivna mjuka robotsystem för önskade applikationer för att konstruera mer flexibla prototyper.

Slirande rörelse av muskuloskeletala ormmodellen med fyra muskelgrupper. Muskelgruppsarrangemangen är optimerade för den snabbaste framhastigheten. Muskelgruppernas färg indikerar muskelkontraktionsnivå. Upphovsman:Nature Communications, doi:10.1038/s41467-019-12759-5.
Engineering slithering ormar
Teamet använde sedan det numeriska tillvägagångssätt som utarbetats i studien för att underlätta tillverkning av biohybridroboter och förstå biomekanik. Bioingenjörer hade tidigare genomfört flera experiment på ormlokalisering för att bygga målrobotreplikat med servomotorer (roterande ställdon). I föreliggande experiment, de utvecklade en helt mjuk elastisk orm som bioinspirerades av riktiga ormar men aktiverades effektivt med flera muskel-sengrupper för att uppnå en jämn ojämn rörelse. Forskargruppen visade att medan biologiska ormar hade flera muskler för att orkestrera gångarter och kroppsdeformationer, modellen krävde bara få funktioner för att smidigt och effektivt glida framåt.
För optimal design, forskarna kopplade sin beräkningslösare med algoritmen Covariance Matrix Adaptation-Evolution Strategy (CMA-ES) för att identifiera platserna och aktiveringsmönstren för maximal hastighet framåt. Zhang et al. jämförde och verifierade resultaten med referenssimuleringar och experimentella inspelningar. Teamet syftade främst till att avslöja dolda arkitektoniska designprinciper och avslöja deras funktion för tekniska ändamål. De ordnade noggrant distribuerad aktivering för smidiga realistiska gångarter i skarp kontrast till stela ormrobotar. Forskarna implementerade också en ram för att förenkla, testa och använda biomekaniska principer för komplexa biologiska system för att skapa en realistiskt slingrande, snabb, mjuk-robotisk orm baserad på några enkla ställdon.
Framifrån av ett par vingar bestående av 6342 trådar, där gröna trådar anger fjädrarna. En initieringsprocess lyfter vingarna från platt läge och följs av ett enda kraftnedslag och uppslag under startskedet. Upphovsman:Nature Communications, doi:10.1038/s41467-019-12759-5.
Engineering fjädervingar
För att demonstrera en mer komplex rörelsestrategi som inkluderar ytterligare biologiska strukturer med kritiska funktioner, laget utvecklade en fjädrad, muskuloskeletala fågelvinge i silikot. Bioingenjörer hade tidigare genomfört en mängd olika studier för att förstå biofysiska egenskaper hos fågelflyg från muskelaktiveringsmönster till fjädernas biomekanik. I det nuvarande arbetet, Zhang et al. betraktade en duvas dynamiska vingstruktur och rekonstruerade fjädrarna i silikon med böjstyvhet, överensstämmer med tidigare studier.
Totalt, de kopplade 19 fjädrar till beräkningsmodellen för vingar som överensstämde med biologiska data från duvor. De inkluderade fyra muskler associerade med axel- och armbågslederna för att styra vingeaktivering och morfing i förhållande till den mänskliga armbågsmodellen. Även om denna förststudiemodell inte fångade komplex aerodynamik i samband med flaxande flygning, den gav en preliminär uppskattning. Teamet reproducerade kinematiken för morfande vingar under start och baserade muskelaktiveringsmönstren på tidigare förvärvade experimentellt inspelade elektromyografisignaler (EMG).
På det här sättet, Xiaotian Zhang och ett team av forskare presenterade en ny metod för att montera heterogena, aktiva och passiva kosseratstavar för att simulera dynamiska, muskuloskeletala arkitekturer som kan genomgå deformation för att underlätta biomimetisk rörelse. Tillvägagångssättet behandlade en befintlig brist på tekniska tekniker inom mjuk robotik för att fylla klyftan mellan styv kroppsmodellering och high-fidelity finite-element method (FEM) simuleringar.
Med hjälp av gynnsamma funktioner som utvecklats i studien, forskargruppen konstruerade mjuka kroppssystem för att lösa ett antal problem i förhållande till mjuk robotik och komplexa biologiska strukturer i olika miljöer. Det nya arbetet visade mångsidigheten i tillvägagångssättet för att upprätta en lovande strategi för vidsträckta tillämpningar över biologiskt konstruerade biologiskt inspirerade strukturer för att upptäcka de bakomliggande egenskaperna hos levande organismer.
© 2019 Science X Network