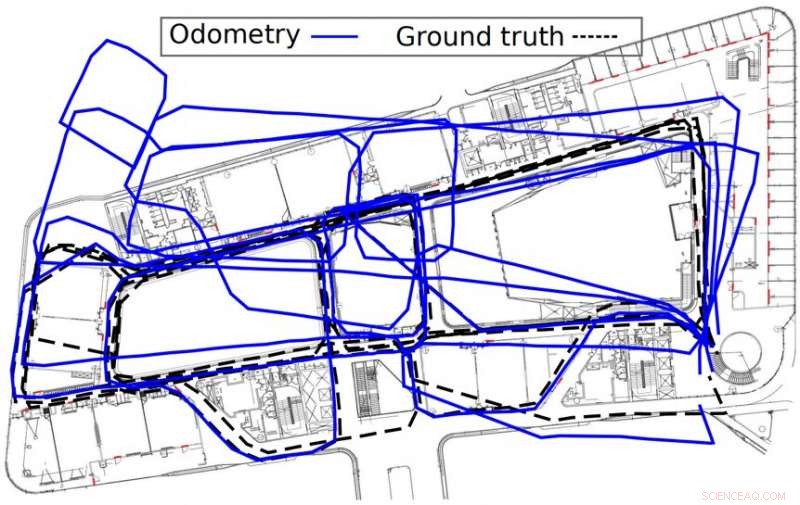
Bild som visar hur grund sanning tillvägagångssätt jämfört med vägmätningstekniker. Kredit:Liu et al.
På senare år har forskarlag världen över har utvecklat nya metoder för simultan lokalisering och kartläggning (SLAM). Dessa tekniker kan användas för att konstruera eller uppdatera kartor över en given miljö i realtid, samtidigt som du spårar en artificiell agent eller robots position inom dessa kartor.
De flesta befintliga SLAM-metoder är mycket beroende av användningen av räckviddsbaserade eller visionbaserade sensorer, både för att känna av miljön och en robots rörelser. Dessa sensorer, dock, kan vara mycket dyrt och kräver vanligtvis betydande beräkningskraft för att fungera korrekt.
Medveten om dessa begränsningar, forskare vid Singapore University of Technology and Design, Southwest University of Science and Technology, University of Moratuwa och Nanyang Technological University har nyligen utvecklat en ny teknik för samverkande SLAM som förlitar sig på räckviddsbaserade eller synbaserade sensorer. Denna teknik, presenteras i en tidning förpublicerad på arXiv, skulle kunna möjliggöra effektivare robotnavigering inom okända inomhusmiljöer till en kostnad som är betydligt lägre än för de flesta tidigare föreslagna metoder.
"Vi strävade efter att använda låg kostnad och låg beräkningssensor som en ersättning för räckviddsbaserade eller visuellt baserade sensorer, "Chau Yuen, en av forskarna som genomförde studien, berättade för TechXplore. "Eftersom moderna byggnader vanligtvis har Wi-Fi-nätverkstäckning, vårt mål är att använda sådan fritt tillgänglig information för att utföra SLAM."
För att utnyttja radiofunktioner som är lätt tillgängliga i de flesta stadsmiljöer, forskarna utvecklade ett tillvägagångssätt för samverkande simultan lokalisering och kartläggning av radiofingeravtryck som kallas C-SLAM-RF. Deras teknik fungerar genom att crowdsense Wi-Fi-mätningar i stora inomhusmiljöer och sedan använda dessa mätningar för att generera kartor eller lokalisera konstgjorda medel.
"Vårt mål är att skapa en radiokarta över miljön med minsta möjliga mänskliga ansträngning genom att utnyttja de inbyggda avkänningsfunktionerna i vanliga smarta telefoner, " förklarade Yuen.
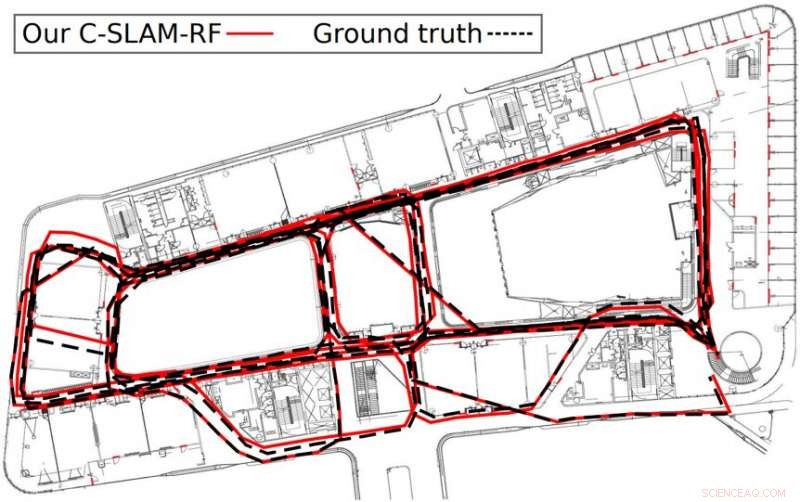
Figur som visar hur uppskattade vägansatser jämförs med SLAM-tekniken som utvecklats av forskarna. Kredit:Liu et al.
Systemet utvecklat av Yuen och hans kollegor får information om styrkan på signalen som kommer från redan existerande Wi-Fi-åtkomstpunkter spridda runt en given miljö, såväl som från PDR-processer (dvs. beräkningar av någons nuvarande position) härledda från en smart telefon. Den använder sedan dessa signaler för att bygga en karta över miljön utan att kräva förkunskaper om miljön eller fördelningen av accesspunkterna inom den. C-SLAM-RF-verktyget som tagits fram av forskarna kan också avgöra om roboten har återvänt till en tidigare besökt plats, känd som "loop stängning, " genom att bedöma likheten mellan olika signalers radiofingeravtryck.
"Befintliga SLAM-metoder använder ofta dedikerade enheter, till exempel, visuella kameror eller räckviddsbaserade LIDAR-sensorer, att mäta likheten mellan observationer genom skanningsmatchning eller funktionsmatchning, som är beräkningsmässigt dyra, "U-Xuan Tan, en annan forskare involverad i studien, berättade för TechXplore. "Vår lösning utnyttjar möjligheten att utföra lokalisering och kartläggning till låg kostnad, allestädes närvarande IoT-enheter som smartphones, på grund av växande popularitet för trådlösa Wi-Fi-nätverk."
Yuen, Tan och deras kollegor testade sin teknik i en inomhusmiljö med en yta på 130 meter x 70 meter. Deras resultat var mycket lovande, eftersom deras system prestanda överträffade den för flera andra befintliga tekniker för SLAM, ofta med stor marginal.
"Vi utvärderade vårt tillvägagångssätt i en storskalig miljö och en positioneringsnoggrannhet på 0,6 meter uppnås utan några förkunskaper om miljön, "Ran Liu, en annan forskare involverad i studien, berättade för TechXplore. "Denna noggrannhet överträffar den senaste fingeravtrycksbaserade lokaliseringsmetoden, vilket kräver en tråkig undersökning av miljön. Beräkningstiden som krävs av vårt tillvägagångssätt är obetydlig jämfört med den avståndsbaserade eller visuella SLAM."
I framtiden, det tillvägagångssätt för samverkande SLAM som detta team av forskare tagit fram kan hjälpa till att förbättra robotnavigering i okända miljöer. Dessutom, det faktum att det inte kräver användning av dyra sensorer och förlitar sig på befintliga Wi-Fi-hotspots gör det till en mer genomförbar lösning för storskaliga implementeringar.
"Vi skulle nu vilja undersöka möjligheten att smälta olika radiosignaler, till exempel cellulär signal, för att förbättra positioneringsnoggrannheten, "Yong Liang Guan, en annan forskare involverad i studien, berättade för TechXplor. "En annan plan är att använda den producerade radiokartan för lokalisering. En kombination med andra sensorer till exempel laseravståndsmätare för att accelerera och förbättra kartläggningen i storskalig miljö kommer också att vara en av vår framtida forskning."
© 2020 Science X Network