Upphovsman:Zhang, Wang &Jiang.
Mikroflygbilar (MAV) kan ha många användbara applikationer, till exempel, hjälpa människor att slutföra lagerinventeringar eller sök- och räddningsuppdrag. Även om många företag världen över redan har börjat producera och använda MAV, några av dessa flygande robotar har fortfarande betydande begränsningar.
Att arbeta mest effektivt, MAV:er bör stödjas av ett effektivt poseringsuppskattningssystem. Detta är ett system eller en metod som kan beräkna en drönares position och inställning, som sedan kan användas för att styra sin flygning, justera hastigheten och underlätta navigeringen medan den fungerar autonomt och fjärrstyrt.
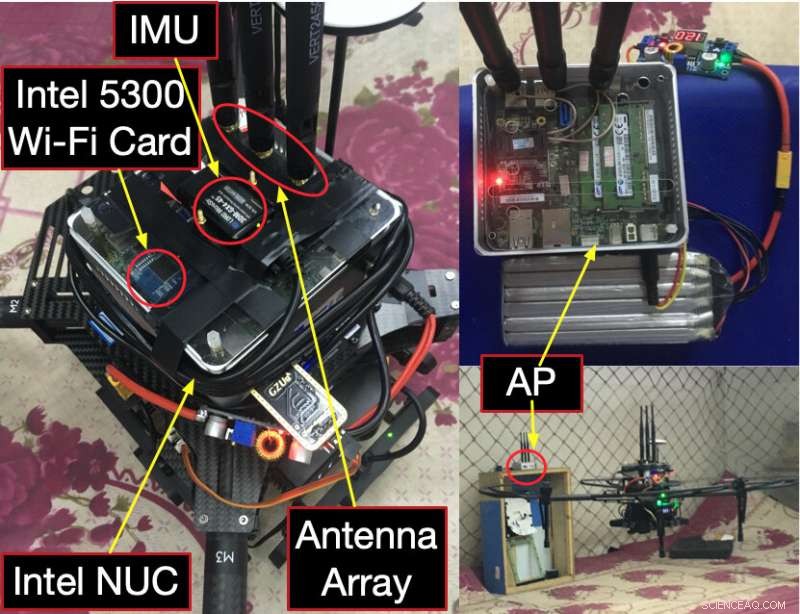
Forskare vid Huazhong University of Science and Technology i Kina har nyligen utvecklat ett nytt system för att uppskatta MAV i inomhusmiljöer. Deras nya tillvägagångssätt, beskrivs i ett papper som är förpublicerat på arXIv och som ska publiceras i IEEE -transaktioner på industriell elektronik , utnyttjar befintlig WiFi -infrastruktur för att möjliggöra effektivare navigering i små och smidiga drönare.
"I vårt tidigare arbete, vi bevisade att det var möjligt att använda WiFi:s lokalisering för att korrigera driften ombord på tröghetssensorn (IMU), "Shengkai Zhang, en av forskarna som genomförde studien, berättade TechXplore. "Dock, tekniken vi utvecklat, kallad CWISE, fungerar bara i öppna utrymmen och utan flervägsfädning. I vår nuvarande studie, vi driver denna metod ytterligare för att ta itu med flervägsproblemet inomhusmiljöer och göra vårt föreslagna system mer praktiskt. "
Huvudsyftet med den nya studien som Zhang och hans kollegor genomförde var att använda lättillgänglig WiFi-infrastruktur för att uppskatta 6-DoF-ställningar för MAV. I motsats till befintliga posestimeringstekniker baserade på datorsyn, systemet de utvecklat är fritt från visuella begränsningar, vilket innebär att det fungerar bra under olika ljus- och miljöförhållanden.
Istället för att analysera visuella stimuli som samlats in av sensorer, systemet utnyttjar de många underbärarna för WiFi-ortogonala frekvensdelningsmultiplexering (OFDM) signaler. Mer specifikt, den använder dessa signaler för att hitta ankomstvinkeln (AoA) för den direkta vägen mellan en MAV och en WiFi -åtkomstpunkt bland de många reflektionerna av signalen i inomhusmiljöer.
Systemet skapat av Zhang och hans kollegor har två huvudkomponenter:en AoA-beräkningsalgoritm och en WiFi-tröghetssensorfusionsmodell. AoA -uppskattningsalgoritmen är en beräkningsmetod som uppskattar MAV -attityder och avlägsnar AoA för positionering. WiFi-tröghetssensorfusionsmodellen, å andra sidan, kombinerar den uppskattade AoA och data som samlats in med hjälp av tröghetssensorer för att optimera en drönares poser.
"Det är välkänt att vinklar kan användas för att lokalisera ett mål via triangulering, dock, utan en metrisk skala, "Sade Zhang." Å andra sidan, IMU för en MAV ger metriska poser men lider av tidsdrift. Vi kombinerar WiFi AoA och tröghetsmätningar och tar det bästa av två världar. "
Systemet som utvecklats av Zhang och hans kollegor har många fördelar jämfört med mer konventionella pose -uppskattningstekniker. Först, den är lätt och kan användas direkt i alla inomhusmiljöer som omfattas av ett WiFi -nätverk. Dessutom, den fungerar bra på arbetsytor med olika ljus- och texturförhållanden.
Studien belyser potentialen med att använda WiFi -anslutningar för att förbättra avkännings- och navigationsstrategier i robotar. Vid test i en rad experiment i inomhusmiljöer, det nya poseringsuppskattningssystemet uppnådde anmärkningsvärda resultat, presenterar ett genomsnittligt positionsfel på 61,7 cm och ett inställningsfel på 0,92 grader. I framtiden, den kan användas för att förbättra MAV -navigering i lager, kontor eller andra inomhusmiljöer.
"För närvarande, noggrannheten hos vår WiFi-tröghetsposestimator ligger på decimeternivå, "Sade Zhang." Vi skulle vilja förbättra det. Under tiden, WiFi i sig har vissa begränsningar, t.ex., strukturblockering, interferens, och så vidare. Vi tror att korrekt koppling av visuell avkänning och trådlös avkänning skulle uppnå en mer robust och exakt posestimering, vilket resulterar i mer praktiska autonoma robotar. "
© 2020 Science X Network