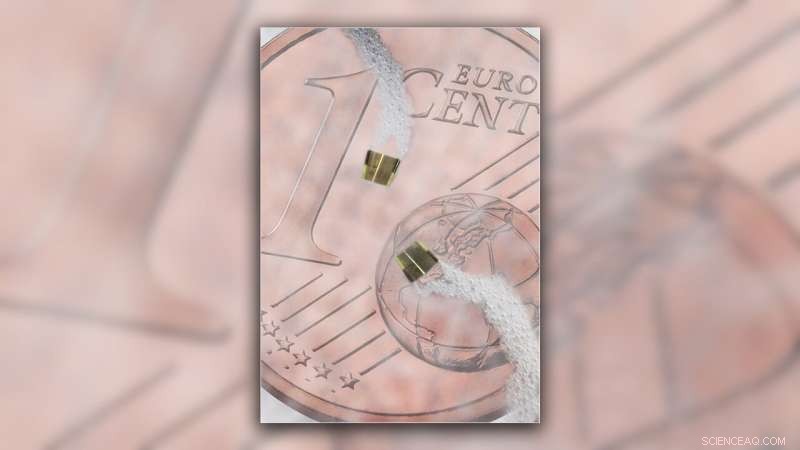
De minsta självgående elektroniska mikrorobotarna som forskarna utvecklat manövrerar i vätska ovanpå ett 1 cent euromynt. Upphovsman:TU Chemnitz.
Ett internationellt forskargrupp under ledning av Dr. Oliver Schmidt, som arbetar vid Chemnitz University of Technology (TU Chemnitz) och Leibniz IFW Dresden har nyligen utvecklat ett mikrorobitiskt system med ett brett utbud av möjliga tillämpningar, allt från att slutföra mikrooperationer till att leverera varor till människor. Denna robot, presenteras i ett papper publicerat i Nature Electronics , bygger på en idé som introducerades av samma forskargrupp för nästan ett decennium sedan.
"Vi började först utforska tanken på att skapa ett litet mikrorobotiskt system som drivs själv av en kraftfull jetmotor och har mikroelektroniska komponenter ombord för nästan tio år sedan, "Schmidt berättade för TechXplore." Vår första idé var att bygga ett smart självgående mikrosystem som kan interagera med enstaka biologiska celler, som har samma storlek som själva mikrosystemet. Detta system ska kunna röra sig, känna sin omgivning, transportlast, leverera läkemedel och utföra mikrooperationer. "
Eftersom Schmidt och hans kollegor först introducerade sitt koncept för ett mikrorobotiskt system, deras team och flera andra över hela världen har försökt att skapa liknande tekniker, främst in vitro (dvs. med petriskålar). Implementering som system inuti människokroppen, dock, har visat sig vara mycket mer utmanande. Faktiskt, för att slutföra uppgifter i kroppen, systemet skulle behöva styras utifrån och informationen som det samlar in (t.ex. diagnosdata) bör lätt överföras till omvärlden (t.ex. till läkare eller vårdpersonal).
"För att ett mikrorobotiskt system ska fungera i människokroppen, den ska innehålla elektrisk energi, sensorer, ställdon, antenner och mikroelektroniska kretsar, "Schmidt förklarade." Huvudmålet med vårt senaste arbete var att ta ett stort steg mot detta sista (och visserligen mycket ambitiösa) slutmål; fortfarande på ett förenklat sätt, självklart."
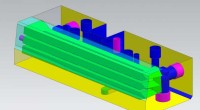
Schmidt och hans kollegor tillverkade sitt flexibla mikrosystem genom att integrera mikro- och nano -elektroniska komponenter på en chipyta, på ett liknande sätt som hur kiselteknik används för att bygga datorchips. En viktig skillnad mellan deras system och vanliga datorchips, dock, är att den förra designen inkluderar jetmotorer som skapats med ett tillvägagångssätt som föregick för ungefär tjugo år sedan, som vanligtvis inte används vid utvecklingen av vanlig mikroelektronik.
"Tricket består i att lägga hårt ansträngda tunna material på chipet, som snäpper tillbaka (roll-up) till schweiziska rullmikrorörstrukturer, när de delamineras från spånytan, "Sa Schmidt." Denna procedur kan kontrolleras väl, så att de upprullade mikrorören är ordentligt anslutna på två motsatta sidor till det mikrorobotiska systemet. Om dessa mikrorör är belagda med platina inuti, syrebubblor genereras genom en katalytisk reaktion, när platina kommer i kontakt med vattenlösning som innehåller lite väteperoxid (H 2 O 2 ). "

Dr Oliver G. Schmidt medan han forskar. Upphovsman:Jacob Müller.
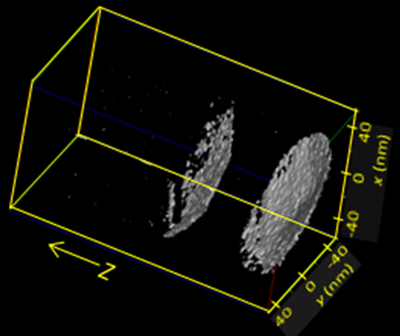
Som ett resultat av den icke-konventionella designstrategin som används av Schmidt och hans kollegor, när det mikrorobotiska systemet placeras i en vattenlösning innehållande väteperoxid (H 2 O 2 ) lösningen kommer in i sina två mikrorör, genererar syrebubblor. Dessa bubblor kastas sedan utanför mikrorörens ändar, accelerera systemet med en mekanism som kallas jetdrivning.
"Denna jetdrivningsprincip var banbrytande av vår grupp för 12 år sedan, Sa Schmidt. Men en dubbelstrålesmotor som i vårt nuvarande arbete byggdes aldrig tidigare. "
Den katalytiska reaktionen i kärnan forskarnas jetdrivningsstrategi kan kontrolleras genom att ändra temperaturen på jetmotorerna. En hög temperatur resulterar i fler bubblor och en starkare dragkraft; en låg temperatur i färre bubblor och en svagare dragkraft.
Schmidt och hans kollegor styr temperaturen på en av de två jetmotorerna genom att applicera en ström som passerar genom ett resistivt element, som är ansluten till motorn. Temperaturförändringar ökar mängden bubblor som genereras och den efterföljande kraften i en av jetmotorerna, vilket i sin tur gör att systemet kan göra höger- eller vänstervridningar.
"Du kan fråga dig själv hur vi levererade strömmen som värmer det resistiva elementet, "Sa Schmidt." För detta ändamål, Vi integrerade en liten antenn i mikrosystemet som kan matas av trådlös energi från utsidan (liknande trådlös induktiv laddning av din mobiltelefon). Så elektrisk energi finns ombord och kan användas, vilket är helt nytt för en så liten självgående mikrobot. "
Den lilla roboten som utvecklats av Schmidt och hans kollegor har också en liten arm, vilket gör att den kan ta tag i och släppa små föremål i sin omgivning. När systemets temperatur ändras, den lilla armen utför olika handlingar, böja sig för att ta tag i föremål (t.ex. mikro-piller) eller böja sig ner för att släppa dem.
"Denna integrerade robotarm är också en helt ny funktion för självgående mikrosystem, "Sa Schmidt." Slutligen, mikroroboten kan ha en liten infraröd LED ombord, som kan slås på med den trådlöst överförda energin. Denna LED kan vara användbar för att spåra mikroroboten inuti kroppen. Att slå på och av små lysdioder på en rörlig mikrorobot har aldrig visats tidigare. "
Det lilla robotsystem som utvecklats av Schmidt och hans team är tillverkat av ett mycket flexibelt material. Det betyder att den kan böjas eller deformeras utan att gå sönder, sålunda kan den till och med passera genom små kapillärer eller andra små kanaler i människokroppen och fortsätta att fungera normalt.
I framtiden, detta nya system kan ha ett antal värdefulla applikationer. Till exempel, det kan slutföra uppgifter i människokroppen som kräver hög precision, inklusive kirurgiska eller diagnostiska ingrepp.
"Vi har visat att elektrisk energi kan överföras trådlöst till extremt små mikrorobotiska system och att denna energi kan användas för att utföra användbara uppgifter:Fjärrstyrning av mikroroboten eller på och av och på en infraröd lysdiod, "Sa Schmidt." Nästa steg blir att köra systemet i biologiska vätskor som blod. För det här syftet, motorerna måste konstrueras på ett lite annorlunda sätt. "
© 2020 Science X Network