Kredit:Unsplash/CC0 Public Domain
Om autonoma fordon någonsin kommer att uppnå en utbredd användning, måste vi veta att de kan navigera i komplexa trafiksituationer, som att smälta in i tung trafik när körfält försvinner på en motorväg. För detta ändamål har forskare från North Carolina State University utvecklat en teknik som gör att mjukvara för autonoma fordon kan göra relevanta beräkningar snabbare - vilket förbättrar både trafik och säkerhet i simulerade autonoma fordonssystem.
"Just nu är programmen som är utformade för att hjälpa autonoma fordon att navigera filbyten beroende av att göra problem beräkningsmässigt enkla nog att lösa snabbt, så att fordonet kan fungera i realtid", säger Ali Hajbabaie, motsvarande författare till en artikel om arbetet och en assistent professor i civil-, bygg- och miljöteknik vid NC State. "Men att förenkla problemet för mycket kan faktiskt skapa en ny uppsättning problem, eftersom verkliga scenarier sällan är enkla.
"Vårt tillvägagångssätt tillåter oss att omfamna komplexiteten i verkliga problem. Istället för att fokusera på att förenkla problemet, utvecklade vi en kooperativ distribuerad algoritm. Detta tillvägagångssätt bryter i huvudsak ner ett komplext problem i mindre delproblem och skickar dem till olika processorer att lösa separat. Denna process, som kallas parallellisering, förbättrar effektiviteten avsevärt."
Vid det här laget har forskarna endast testat sitt tillvägagångssätt i simuleringar, där delproblemen delas mellan olika kärnor i samma datorsystem. Men om autonoma fordon någonsin använder inflygningen på vägen, skulle fordonen nätverka med varandra och dela datorunderproblemen.
I proof-of-concept-testning tittade forskarna på två saker:om deras teknik tillät mjukvara för autonoma fordon att lösa sammanslagningsproblem i realtid; och hur det nya "kooperativa" tillvägagångssättet påverkade trafiken och säkerheten jämfört med en befintlig modell för navigering av autonoma fordon.
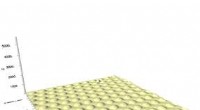
När det gäller beräkningstid fann forskarna att deras tillvägagångssätt gjorde det möjligt för autonoma fordon att navigera i komplexa körfältsscenarier för motorvägar i realtid i måttlig och tung trafik, med spottier prestanda när trafikvolymerna blev särskilt höga.
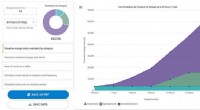
Men när det gällde att förbättra trafiken och säkerheten gick den nya tekniken exceptionellt bra. I vissa scenarier, särskilt när trafikvolymen var lägre, fungerade de två tillvägagångssätten ungefär likadant. Men i de flesta fall överträffade det nya tillvägagångssättet den tidigare modellen med avsevärd marginal. Dessutom hade den nya tekniken noll incidenter där fordon var tvungna att stanna eller där det var "nära kraschförhållanden". Den andra modellens resultat inkluderade flera scenarier där det fanns bokstavligen tusentals stopp och nära kraschförhållanden.
"För ett proof-of-concept-test är vi mycket nöjda med hur denna teknik har presterat", säger Hajbabaie. "Det finns utrymme för förbättringar, men vi har fått en bra start.
"Den goda nyheten är att vi utvecklar dessa verktyg och tar itu med dessa problem nu, så att vi har en bra position att säkerställa säkra autonoma system när de används mer allmänt."
Uppsatsen, "Distribuerad kooperativ bana och filskiftande optimering av anslutna automatiserade fordon:motorvägssegment med körfältsfall", visas i tidskriften Transportation Research Part C . Första författare till uppsatsen är Mehrdad Tajalli, nyligen doktor. examen från staten NC. Uppsatsen var medförfattare av Ramin Niroumand, en Ph.D. student vid NC State. + Utforska vidare