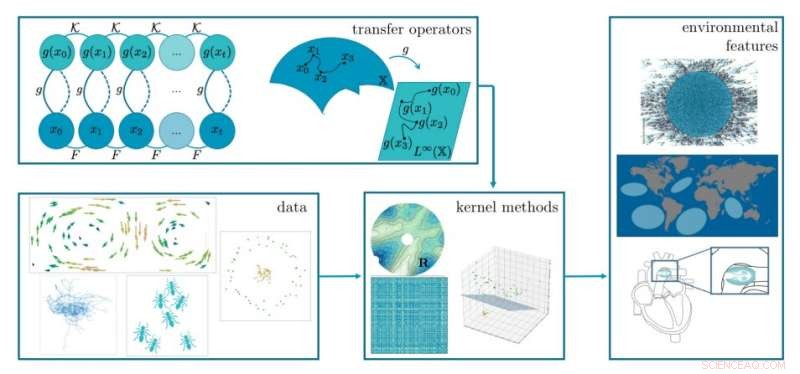
Diagram över samspelet mellan data, överföringsoperatörer, kärnmetoder och miljöegenskaper. Transferoperatorer representerar dynamiska system, där ett tillstånd x ∈ X lyfts till ett utrymme L∞X och g(x) ger systemets fysiska egenskaper. Många system definieras av data som uppvisar komplexa mönster, såsom två kapslade ringar, flöden i hav, taxibanor och biologiska beteenden. Kärnmetoder omvandlar denna data till ett alternativt utrymme med hjälp av kärnfunktioner. Data är då lättare att tolka, till exempel genom att separera två kapslade ringar eller genom att skapa en Gram-matris för användning i en kärnalgoritm. Överföringsoperatörer representeras genom kärnmetoder genom att bädda in dynamiska system i ett kärnutrymme, R. Kernel-algoritmer extraherar miljöegenskaper från överföringsoperatörer, som där människor tenderar att samlas i folkmassor, områden med gyres i oceaner eller blodflödesmönster i hjärtan . Kredit:Salam, Edwards och Hsieh.
Under de senaste åren har robotiker skapat en mängd olika system som så småningom kan fungera i verkliga miljöer. Eftersom de flesta verkliga miljöer, särskilt offentliga utrymmen, är dynamiska och oförutsägbara, bör robotar kunna få en god förståelse för sin omgivning för att effektivt navigera i dessa miljöer.
Forskare vid University of Pennsylvanias GRASP Laboratory har nyligen genomfört en studie som undersöker hur funktioner relaterade till en given miljö kan förbättra en robots medvetenhet och dess förmåga att navigera i sin omgivning. Deras artikel, förpublicerad på arXiv, baserades på två av deras tidigare forskningsinsatser.
Den första av dessa tidigare studier introducerade en serie strategier som använde miljöinformation för att förbättra en robots autonomi i att konkurrera med en specifik uppgift, nämligen att lokalisera källan till ett kemikalieutsläpp i turbulenta flöden. Som en del av den andra studien, å andra sidan, introducerade teamet nya kontrollpolicyer på agentnivå som utnyttjade miljöegenskaper eller buller för att upprätthålla en önskad rumslig fördelning av avkännande robotagent i en geofysisk flödesmiljö.
"Våra tidigare arbeten fokuserade på lagrangiska koherenta strukturer, en viktig egenskap hos dynamiska system i många applikationer som oceanografi och väderförutsägelser, och hur de kan användas i robotteknik," sa Tahiya Salam, en av forskarna som genomförde studien, TechXplore. "Vårt nya arbete fokuserar på hur en liknande funktion, sammanhängande uppsättningar, kan läras online och nya tillvägagångssätt för hur dessa funktioner kan användas i robotapplikationer, som publikövervakning i urbana miljöer och energieffektiv navigering i vatten."
I sin nya studie använde Salam och de andra forskarna vid GRASP Laboratory en serie tekniker som kombinerar globala dynamikmetoder med maskininlärning. I detta sammanhang avser termen "global dynamik" den övergripande dynamiken i en given miljö och de egenskaper som kännetecknar denna dynamik.
"Tekniken vi använde gjorde att vi kunde lära oss globala funktioner från data som samlades in från de miljöer som robotar arbetar i," förklarade Salam. "De globala funktionerna, som kallas koherenta uppsättningar, har intressanta egenskaper; de representerar nämligen regioner som sprids mycket långsamt. Genom att använda denna information om regioner som sprids mycket långsamt kan robotar utnyttja dessa funktioner för beslutsfattande."
Salam och hennes kollegor beräknade dessa så kallade "koherenta uppsättningar" online med hjälp av maskininlärningstekniker. Därefter designade de ett ramverk som kunde styra en robots beteenden baserat på de miljöegenskaper som de beräknade.
"Vi hittade ett sätt att beräkna koherenta uppsättningar i realtid utan att ha detaljerad information om en modell som beskriver miljön," förklarade Salam. "Dessutom kunde vi använda dessa sammanhängande uppsättningar på smarta sätt för att uppnå smarta robotbeteenden."
Salam och hennes kollegor utvärderade ramverket de utvecklade i en serie experiment och fann att det avsevärt överträffade offlinemetoder för att beräkna miljöegenskaper. Teamet demonstrerade specifikt effektiviteten av modellen de utvecklade i två scenarier där robotar övervakade stadsmiljöer och navigerade på vatten.
I framtiden kan ramverket som introducerats av detta team av forskare i slutändan bidra till att förbättra förmågan hos både befintliga och framväxande robotar att navigera i okända och dynamiska miljöer. Samtidigt planerar Salam att ytterligare utforska potentialen med att använda miljöegenskaper för att förbättra robotnavigeringen.
"I mina nästa studier kommer jag att fortsätta att undersöka tekniker som kopplar samman global dynamik och maskininlärning i mer allmänna ramar," tillade Salam. "Till exempel skulle jag vilja representera den globala dynamiken i godtyckliga miljöer från sensormätningar som samlats in av robotar."