Upphovsman:Wayve
Ett team av forskare vid den brittiska startupen Wayve har utvecklat ett sätt att tillämpa djupinlärningsnätverk för autonom körning. I ett nyligen blogginlägg (tillsammans med medföljande YouTube -demonstrationsvideo) beskrev representanter hur deras teknik fungerar, och erbjuda en demonstration med en riktig bil på en riktig väg.
Som teamet på Wayve konstaterar, de flesta självkörande bilar använder en mängd kameror och sensorer, tillsammans med kartverktyg och mycket datorprogrammering. Men ett sådant tillvägagångssätt, de bråkar, förbiser vad som verkar vara ett slags tak. Autonoma bilar programmerade av stora företag som Google har nått en punkt där de är bra, men inte tillräckligt bra för vanligt bruk. Detta, de hävdar, beror på att sådana bilar ännu inte är tillräckligt smarta för att hantera de otaliga förhållanden som finns på en genomsnittlig väg. Vad behövs, de föreslår, är en smartare dator, inte fler sensorer eller programmering.
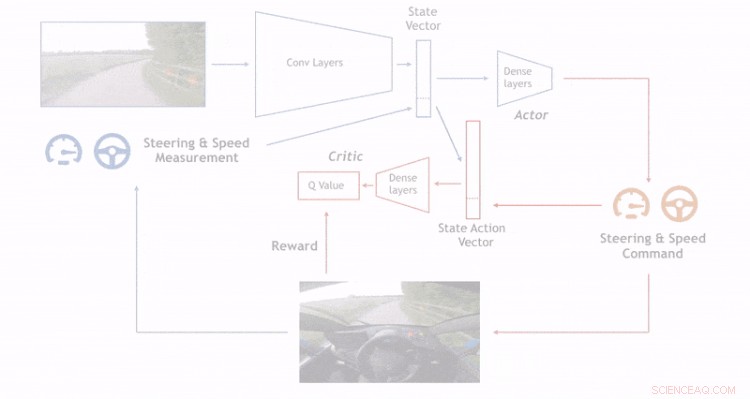
Teamet på Wayve tror att ett smartare tillvägagångssätt är att använda förstärkningsinlärningsalgoritmer som de som används i sådana projekt som DeepMind – låt datorn lära sig hur man gör något på samma sätt som människor gör, genom att öva. Förstärkningsinlärningsalgoritmer är det som ligger i hjärtat av djupa inlärningsnätverk - de lär sig genom att göra, om och om igen, förbättras allt eftersom. När det gäller autonom fordonskontroll, det skulle innebära att köra bil tills de får rätt.
För att visa hur väl ett sådant tillvägagångssätt kan fungera, ett team på Wayve utrustade en Renault Twizy med en enda kamera och gas, broms- och styrningsutrustning och kopplade dem sedan till en grafikprocessor och en dator som kör förstärkningsinlärningsalgoritmer som företaget har utvecklat. Datorn fick "höra" att det optimala resultatet skulle vara att bilen kör framåt längs en väg utan att lämna vägen. Ju längre den kunde göra detta, desto bättre. De lade sedan till en mänsklig förare och placerade bilen på en landsväg. Den mänskliga föraren skulle peka bilen i rätt riktning och sedan låta datorn ta över. Om bilen var nära att köra av vägen, människan skulle stoppa det, få bilen justerad och ge datorn en ny chans. På detta sätt, datorn kunde lära sig att förhindra att bilen körde av vägen på cirka 20 minuter. Efter det, det kunde fortsätta på obestämd tid.
© 2018 Tech Xplore