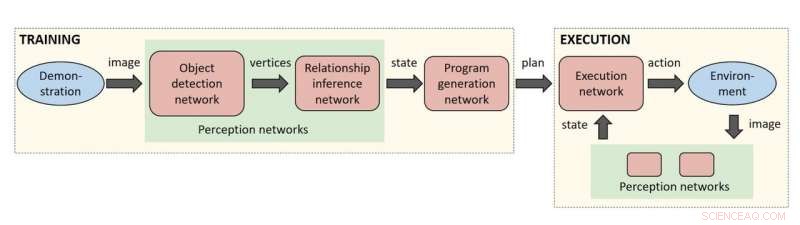
En beskrivning av hur metoden fungerar:En kamera hämtar ett livevideoflöde av en scen, och positionerna och förhållandena för objekt i scenen härleds i realtid av ett par neurala nätverk. De resulterande uppfattningarna matas till ett annat nätverk som genererar en plan för att förklara hur man återskapar dessa uppfattningar. Till sist, ett exekveringsnätverk läser planen och genererar åtgärder för roboten, med hänsyn till världens nuvarande tillstånd för att säkerställa robusthet mot yttre störningar. Kredit:NVIDIA
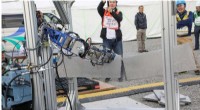
NVIDIA-forskare har börjat lära en robot att slutföra en uppgift genom att – här är kickern – helt enkelt observera en människas handlingar. Nätverk tränades enligt beskrivningen i en video. Systemet testades i den verkliga världen på ett pick-and-place-problem med att stapla färgade kuber, och de använde en Baxter-robot.
Ett team med sex författare diskuterade detta arbete, "Syntetiskt tränade neurala nätverk för att lära sig mänskliga läsbara planer från verkliga demonstrationer." Deras framgång involverade en robot som kunde lära sig en uppgift från en enda demonstration i den verkliga världen.
Varför det är viktigt:Planerare utforskar frågor om hur människor kommer att arbeta tillsammans med robotar – hur säkert och effektivt kan detta göras? Författarna uttryckte det tydligt. "För att robotar ska kunna utföra användbara uppgifter i verkliga miljöer, det måste vara lätt att kommunicera uppgiften till roboten; detta inkluderar både det önskade slutresultatet och alla tips om det bästa sättet att uppnå det resultatet."
Frederic Lardinois i TechCrunch vägde in:"Industrirobotar handlar vanligtvis om att upprepa en väldefinierad uppgift om och om igen. Vanligtvis, det innebär att utföra dessa uppgifter på säkert avstånd från de ömtåliga människorna som programmerade dem. Mer och mer, dock, forskare funderar nu på hur robotar och människor kan arbeta i närheten av människor och till och med lära av dem."
Lardinois sa Dieter Fox, senior chef för robotforskning på NVIDIA, berättade för honom att teamet ville möjliggöra denna nästa generation av robotar som säkert kan arbeta i närheten av människor. Robotar kommer att behöva lära sig hur de kan hjälpa människor, oavsett om det är i industriella miljöer eller i människors hem.
Teamet visade ett system för att sluta sig till och köra ett läsbart program från en verklig demonstration.
NVIDIAs utvecklarsajt sa att detta var det första i sitt slag för djupinlärningssystem som kan lära en robot att slutföra en uppgift bara genom att titta på en människas handlingar. "Med demonstrationer, en användare kan kommunicera en uppgift till roboten och ge ledtrådar om hur man bäst utför uppgiften."
Deras system involverade en serie neurala nätverk. Hur de fungerade:forskarna tränade en sekvens av neurala nätverk för att utföra uppgifter i samband med perception, programgenerering och programexekvering.
Deras teknik:En kamera skaffade ett livevideoflöde av en scen där objekts positioner och relationer antogs i realtid av ett par neurala nätverk. Dessa matades till ett annat nätverk som genererade en plan för att förklara hur man återskapar dessa uppfattningar. Ett exekveringsnätverk läste planen och genererade åtgärder för roboten.
Vad skiljer deras utforskning från tidigare forskning? En skillnad ligger i att träna neurala nätverk. Nuvarande tillvägagångssätt kräver stora mängder märkt träningsdata – en "allvarlig flaskhals i dessa system, " sa NVIDIAs webbplats.
I kontrast, "Med syntetisk datagenerering, en nästan oändlig mängd märkt träningsdata kan produceras med mycket liten ansträngning."
Lardinois in TechCrunch kallade deras forskning "ett viktigt steg i denna övergripande resa för att vi snabbt ska kunna lära en robot nya uppgifter."
Med tanke på den starka visuella aspekten av denna träningsprocess, han skrev, Nvidias bakgrund inom grafikhårdvara hjälper säkert. TechSpot noterade hur "att köra alla dessa neurala nätverk kräver några seriösa beräkningsmöjligheter."
Forskarna använde NVIDIA TITAN X GPU:er.
Jonathan Tremblay, Thang Till, Artem Molchanov, Stephen Tyree, Jan Kautz, Stan Birchfield är laget bakom tidningen.
© 2018 Tech Xplore