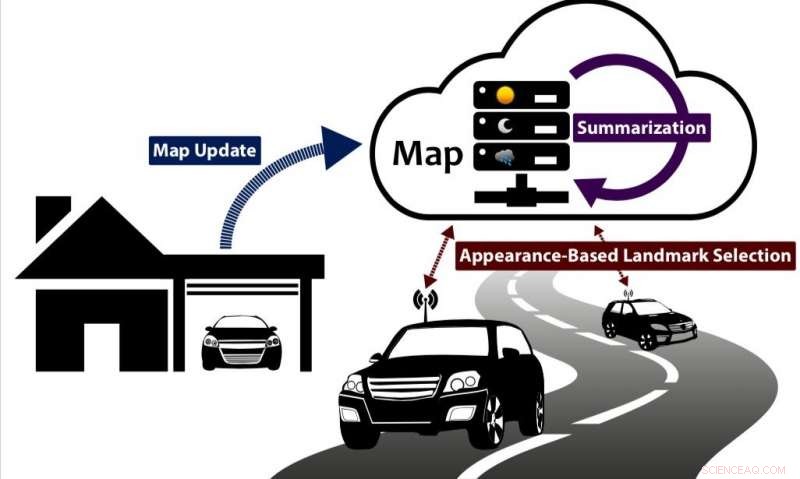
En schematisk översikt över vårt "kompletta" visuella lokaliserings- och kartsystem. Kredit:Bürki et al.
Forskare vid ETH Zürichs Autonomous Systems Lab har nyligen utvecklat en karthanteringsprocess för visuella lokaliseringssystem, speciellt utformad för drift i utomhusmiljöer med flera fordon. Deras studie, presenteras på årets Intelligent Vehicles Symposium (IV) och tillgänglig på arXiv, tar itu med den viktigaste utmaningen med att införliva stora mängder visuell lokaliseringsdata i en livslång visuell karta, för att konsekvent ge effektiv lokalisering under alla utseendeförhållanden.
"Självlokalisering är avgörande för alla typer av mobila robotar, inklusive autonoma fordon, " Mathias Bürki, en av forskarna som genomförde studien, berättade för Tech Xplore. "Medan de flesta autonoma forskningsfordon är utrustade med 3D LiDAR-sensorer, dessa är fortfarande dyra, och deras lämplighet för framtida massproduktion är därför tveksam. Å andra sidan, kamerasensorer är mycket billiga, och har redan tagit sig in i nuvarande bilparker (t.ex. för parkeringsassistentsystem). Därför, vi har undersökt potentialen i att använda kameror som en huvudsensor för exakt lokalisering av autonoma fordon."
En av de främsta utmaningarna när man utvecklar visuella lokaliseringssystem för utomhusmiljöer är att se till att dessa system klarar utseendemässiga förändringar väl. Dessa inkluderar båda förändringar som sker på kort sikt (t.ex. belysning, skuggor, etc.) och långsiktiga (t.ex. säsongsmässiga förändringar, lövverk, etc.).
Tidigare forskning fann att kartor skapade för visuell lokalisering teoretiskt sett kunde anpassas för att fungera under olika förhållanden utomhus. Ändå, att anpassa dessa kartor kan bli mycket dyrt, kräver avsevärda resurser som spenderas på servrarna som underhåller kartorna och på de autonoma fordonen själva. Även om det finns ett antal lösningar som kan hjälpa till att minska kostnaderna och ta itu med det här problemets komplexitet, än så länge, dessa har endast undersökts isolerat.
"Målet med vår senaste forskning var att kombinera olika komponenter och tillvägagångssätt som förbättrar skalbarheten, såsom offline kartsammanfattning, och onlineutseendebaserat urval av landmärken, för att bygga ett helt skalbart och resurseffektivt lokaliserings- och kartläggningssystem, " Bürki förklarar. "Vi ville också undersöka i detalj hur väl det här systemet fungerar i verkligheten, långsiktiga förhållanden, hur lång tid det tar för de visuella kartorna att konvergera till ett stabilt tillstånd, hur väl de olika komponenterna som handlar om skalbarhet fungerar tillsammans, och om den ena stör den andra på ett oönskat sätt."
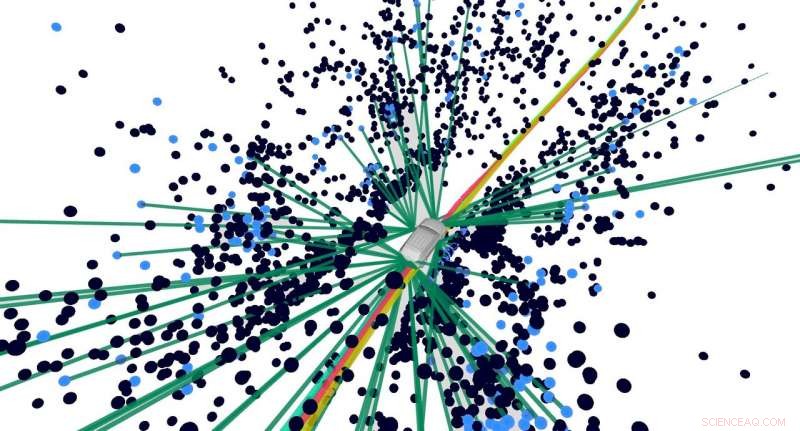
En skärmdump från forskarnas visuella lokaliseringssystem. De mörka och ljusblå sfärerna indikerar 3D-positionen för de visuella landmärken som används för lokalisering. Ljusblått indikerar de som väljs av utseendebaserat landmärke, medan de mörka är de som kasseras. De grönaktiga linjerna indikerar matchningar mellan livekamerabilderna i bilen (framifrån-, vänster-, bak- och högerkamera), och 3D-landmärkena på kartan. Genom dessa matcher, platsen (position, orientering) av bilen antas. De tjocka färgade linjerna illustrerar banorna där bilen körde under inspelningen av datamängderna som användes för att bygga multisessionskartan. Kredit:Bürki et al.
Karthanteringsprocessen som utvecklats av Bürki och hans kollegor fungerar genom att lägga till nya datamängder till kartan över tid, kontinuerligt uppdatera den för att bättre klara nya utseendeförhållanden. Varje gång en ny datauppsättning läggs till kartan, ett efterföljande kartsammanfattningssteg säkerställer att dess storlek inte överstiger en viss gräns.
"Om den nya datamängden har spelats in under utseendeförhållanden som redan är väl täckta av kartan, datasetet läggs inte till på kartan, men statistiken om landmärkeobservationerna förbättras, vilket i gengäld gör det utseendebaserat landmärkeval i framtida sorteringar mer effektivt, " förklarar Bürki.
Forskarna testade den nya karthanteringsprocessen i den verkliga världen under utmanande utomhusförhållanden. Resultaten av deras utvärderingar var mycket lovande, föreslår att deras lätta karthanteringsmekanism kan hjälpa till att utveckla visuella lokaliseringssystem för autonoma fordon som fungerar bra under olika utseendeförhållanden, samtidigt som de presterar bättre vid val av landmärken.
"Vårt mest meningsfulla fynd var att det verkligen är möjligt och praktiskt genomförbart att bygga ett sådant visuellt lokaliserings- och kartläggningssystem som a) är, och förblir effektiv, b) är, och förblir skalbar, och c) ger korrekt lokalisering i utomhusmiljöer på lång sikt, "Bürki sa. "En annan upptäckt var att online-utseendebaserat landmärkeval och offlinekartas sammanfattning fungerar bra tillsammans och kompletterar varandra."
I framtiden, mest högpresterande autonoma fordon kommer troligen att vara utrustade med 3D LiDAR-sensorer, eftersom dessa för närvarande framstår som väsentliga för att garantera säkerheten och säkerställa att fordonet effektivt uppfattar hinder i sin omgivning, inklusive fotgängare. Nyligen, kostnaden för dessa sensorer har minskat avsevärt, vilket också skulle kunna underlätta deras utbredda antagande under kommande år.
"Vi kommer nu att fokusera vår forskning mer på frågan om hur LiDAR-sensorer kan användas för att stödja visuell lokalisering, " sa Bürki. "Särskilt i dåliga ljusförhållanden, kameror når oundvikligen sina gränser, medan LiDAR är väl lämpade även för mörka förhållanden."
© 2018 Tech Xplore














