Ett team av forskare har utvecklat en konstgjord taktil sensor som efterliknar mänsklig huds förmåga att upptäcka ytinformation, såsom former, mönster och strukturer. Detta kan vara ett steg närmare att tillverka elektroniska enheter och robotar som kan uppfatta förnimmelser som grovhet och jämnhet.
"Att härma de mänskliga sinnena är ett av de mest populära områdena inom teknik, men beröringssinnet är notoriskt svårt att replikera, " säger Kwonsik Shin, ingenjör vid Koreas Daegu Gyeongbuk Institute of Science and Technology (DGIST) och huvudförfattare till studien publicerad i IEEE/ASME-transaktioner på mekatronik .
Människor känner inte bara av flera egenskaper i sin miljö samtidigt, som tryck, temperatur, vibration, spänning och skjuvkraft, men vi upptäcker också psykologiska parametrar som grovhet, jämnhet, hårdhet och smärta. Att upptäcka exakt ytinformation är ett avgörande första steg mot att replikera psykologiska känselförnimmelser.
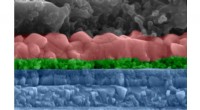
För att tackla denna utmaning, DGIST-forskare slog sig ihop med kollegor från ASML Korea, Dongguk University-Seoul, Sungkyunkwan University och University of Oxford. De utvecklade en enhet som kan mäta ytstrukturer med hög noggrannhet. Sensorn är gjord av piezoelektriska material - mycket känsliga material som kan generera elektrisk kraft som ett svar på applicerad stress. Dessa material har liknande egenskaper som hud.
Den nya sensorn har flera fördelar jämfört med befintliga konstgjorda sensorer. Först, den kan upptäcka signaler genom både beröring och glidning. Detta efterliknar de två sätt som människor känner av ytegenskaper:genom att peta i den eller köra fingrarna över den. De flesta konstgjorda sensorer använder en enda metod. Andra, den består av en rad flera receptorer, vilket innebär att glidhastigheten kan beräknas med hjälp av tidsintervallet mellan två receptorsignaler och avståndet mellan dem. De flesta robotfingrar använder en enda receptor, kräver en extern hastighetsmätare.
Forskarna testade sin sensor genom att trycka på frimärken formade som en fyrkant, triangel eller kupol mot sensorytan. De lade också till mjukt material till sensorn för att se om den kunde mäta djup, alltså avkänning i tre dimensioner. Sensorn producerade olika spänningar beroende på formen på stämpeln. Resultaten visar att sensorn har hög rumslig upplösning och kan representera ytegenskaperna hos vissa objekt, såsom bredd och stigning, med hög noggrannhet. Dock, för närvarande, sensorn kan inte skilja mellan former perfekt i 3D.
I framtiden, sensorn kan integreras i elektroniska enheter, som robotar eller smarta telefoner, för att förbättra deras förmåga att upptäcka ytstrukturer.