National Oceanography Centers Autosub Long Range 6000 AUV, före distribution under FilchnerRonne ishylla i Antarktis. Upphovsman:Sprague et al.
Forskare vid Royal Institute of Technology (KTH) och National Oceanography Center har nyligen använt beteende träd (BT) för att designa modulära, mångsidig, och robusta kontrollarkitekturer för kritiska uppdrag. Deras studie, förpublicerad på arXiv, specifikt tillämpat en BT -ram på styrsystemet för autonoma undervattensfordon (AUV).
AUV är undervattensfordon som används för en mängd olika uppdrag, som att upptäcka och kartlägga nedsänkta föremål eller identifiera faror och hinder för navigering. På grund av begränsningarna i deras kommunikationsbandbredd och räckvidd, dessa fordon kan inte förlita sig på fjärrstyrda lösningar som används av flyg- eller markopererade robotar.
Dessutom, AUV används vanligtvis i avlägsna områden, så att återställa dem efter ett fel är ofta mycket utmanande och dyrt. För att hantera dessa utmaningar, AUV -styrsystem bör vara både robusta och mångsidiga, säkerställa fordonets säkerhet och anpassa sig till olika situationer.
Forskargruppen vid KTH och National Oceanography Center försökte ta itu med dessa utmaningar med beteende träd (BTs), matematiska modeller som nyligen blivit alltmer populära inom AI och robotik. BT-enheter utvecklades ursprungligen för videospel för att öka modulariteten hos kontrollstrukturer för icke-spelare (NPC).
"Denna modularitet möjliggör effektiv testning, inkrementell funktionalitet och kodåteranvändning, som alla har varit ganska fördelaktiga inom videospelindustrin, "Christopher Iliffe Sprague, en av forskarna som genomförde studien, berättade TechXplore. "Liknande, vi tycker att dessa aspekter är ganska användbara vid utformningen av robotisk artificiell intelligens (AI), de viktigaste fördelarna är att beteenden kan återanvändas och testas i samband med andra beteenden på högre nivå utan att ange deras relation till efterföljande beteenden. Det här är slående fördelar jämfört med de mer konventionellt använda finite-state-maskinerna. "
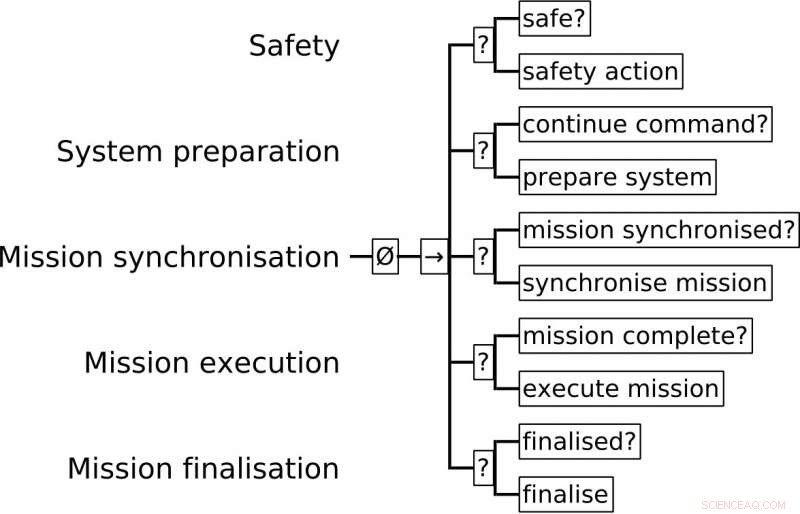
Allmänt uppdragskritiskt system BT. Robusthet uppnås genom att alltid kontrollera säkerhetsförhållandena och vidta lämpliga åtgärder vid behov. Upphovsman:Sprague et al.
Väsentligen, BT ger en hierarkisk struktur för att växla mellan flera uppgifter. I missionskritiska system, såsom spaningsfordon eller självkörande bilar, ett överdrivet mål kan ofta delas upp i flera deluppgifter. Därför, BT kan hjälpa till att strukturera dessa uppgifter bättre och växla mellan dem.
"Med BT:s inneboende hierarkiska struktur, uppgifter kan brytas ned i varierande grad av specificitet, "Sprague förklarade." I vårt papper, vi visar detta i samband med AUV:er som har till uppgift att utföra ett uppdrag som definieras av en sekvens av waypoints. Vi definierar först generellt en BT som uppfyller kraven för systemets domän (dvs. undervattensfordon), förfina sedan BT ytterligare genom att lägga till deluppgifter som rör specifika mål. "
Sprague och hans kollegor tillämpade denna process av BT -förfining på ett AUV -uppdrag som utfördes av National Oceanography Institute. Deras BT -ram gjorde AUV -styrsystem mer robusta, övervaka deras säkerhet innan du fortsätter till andra efterföljande uppgifter. BT möjliggjorde också större mångsidighet, prioritera deluppgifter och låta systemet flexibelt växla mellan dem.
"Det viktigaste av våra studieresultat är att vi har visat hur beteende träd först kan beskrivas för att uppfylla allmänna domänkrav och sedan förfinas ytterligare för specifika uppdrag, utan att offra det ursprungliga trädets struktur, "Sprague sa." Den avgörande avhämtningen från detta är att man kan införa vissa uppgiftsprioriteringar, säkerhet är det viktigaste, och behåll dem oavsett hur missionsspecifika trädet blir. "
Sprague och hans kollegor har framgångsrikt visat fördelarna med att använda BT för att styra verksamhetskritiska system, som AUV:er. Dock, graden i vilken uppgifter kan abstraheras med hjälp av BT är fortfarande begränsad av människors förmåga att identifiera uppdelning av uppgifter. Även om uppgifter i vissa fall kan brytas ner intuitivt, i andra är systemets beteenden mycket mer komplexa.
"Vi försöker nu automatiskt syntetisera BT från exempel, med optimalt i åtanke, "Sa Sprague." I en annan tidning, vi undersökte hur man implementerar optimal kontroll med maskininlärningsmetoder för specifika uppgifter. Vi skulle nu vilja undersöka med hjälp av sådana metoder för att identifiera och optimera uppgifter och övergripande trädstrukturer från exempel. Vi misstänker att detta kommer att avslöja beteenden som är utmanande att identifiera av människor. "
© 2018 Science X Network