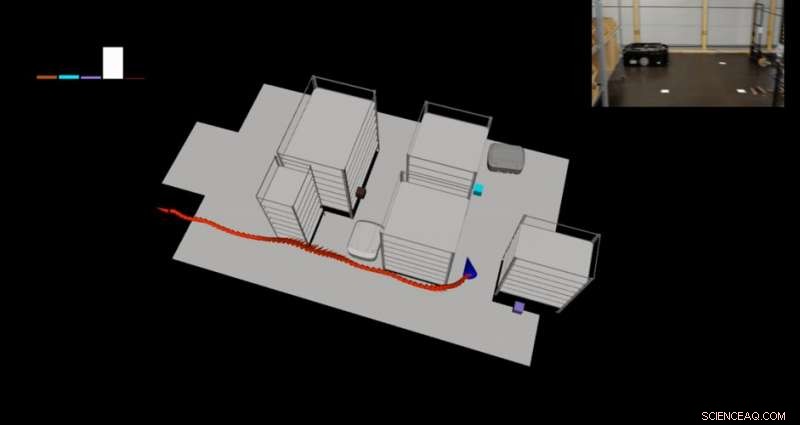
Banan för den mänskliga arbetaren i lagerområdet testområde. Platsdata tillhandahålls av Hololens lokaliseringsalgoritm. Längst upp till höger syns förstapersonsvyn av arbetaren. Längst upp till vänster finns sannolikheten för att arbetaren går till ett specifikt mål. Kredit:Petkovic et al.
Den snabba tillväxten av logistikföretag har skapat ett behov av mer utvecklade och effektiva lagersystem. Framsteg inom robotik kan hjälpa till att tillgodose dessa behov genom att automatisera uppgifter som för närvarande utförs av människor, påskynda arbetsflödet avsevärt.
För att arbeta säkert och effektivt, dock, robotlagerassistenter ska kunna känna igen sina mänskliga operatörers avsikter. Forskare vid universitetet i Zagreb och Karlsruhe Institute of Technology har nyligen utvecklat en algoritm för uppskattning av mänskliga avsikter baserad på teorier om sinnet (ToM). ToM är den mänskliga förmågan att känna igen avsikter, tro, önskningar, känslor, och mentala tillstånd hos andra människor.
"Vår forskning föddes ur EU:s Horizon 2020-projekt SafeLog, som syftar till att tillåta säker ingång för människor till helt automatiserade lager, där mobila robotar bär rack runt, utan att stänga ner hela flottan av robotar, "David Puljiz, en av forskarna som genomförde studien, berättade TechXplore. "Detta görs genom att använda en specialdesignad säkerhetsväst och en AR-enhet för att vägleda och hjälpa arbetaren att navigera i den här miljön."
För att öka säkerheten, lagersäkerhetssystemet som forskarna har utarbetat planerar en robots väg så att den inte krockar med mänskliga arbetares. För att det ska fungera, den behöver veta vart den mänskliga operatören är på väg, särskilt om han inte är på väg till en tidigare överenskommen plats.
Puljiz och hans kollegor observerade rörelsen hos enskilda mänskliga arbetare i lagermiljöer och validerade dem med avseende på deras målplatser, med hjälp av en metod som kallas generaliserad Voronoi-diagrambaserad planering. Dessa observationer matades sedan till en dold Markov -modell, som kan uppskatta en arbetares avsikter online när han navigerar i föränderliga miljöer.
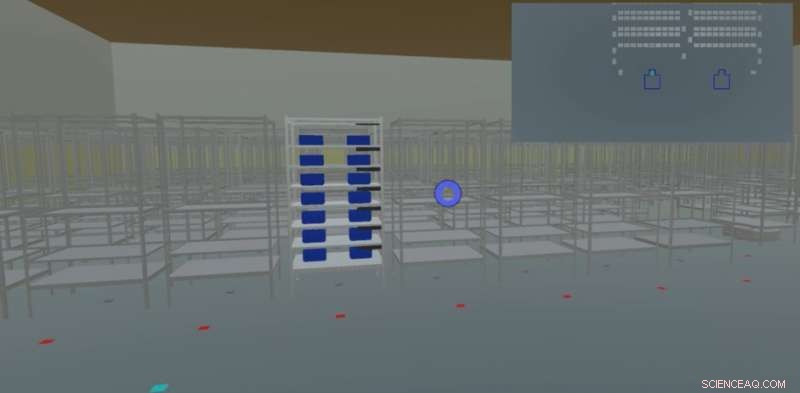
Förstepersonsvy i VR-miljön, används för att testa algoritmen i storskaliga scenarier. Längst upp till vänster kan du se ett fågelperspektiv av området runt arbetaren inklusive de mobila robotarna. Upphovsman:Puljiz et al.
"Den föreslagna ToM-baserade algoritmen för uppskattning av mänskliga avsikter för flexibla robotiserade lager är baserad på dold Markov-modellrörelsevalidering, " Tomislav Petkovic, en annan forskare som är involverad i studien, berättade för TechXplore. "Vi observerar arbetarens rörelse och validerar den med avseende på målplatserna med hjälp av generaliserad Voronoi-diagrambaserad vägplanering. Dessa observationer bearbetas sedan av det dolda Markov-modellramverket, som uppskattar medarbetarnas avsikter online och kan hantera förändrade miljöer. LAMOR-labbet vid universitetet i Zagreb har utvecklat algoritmens backend:rörelsevalidering och måluppskattning."
För att utvärdera modellens effektivitet, IPR Lab vid Karlsruhe Institute of Technology genomförde avsiktstestningsexperiment i en testmiljö för små lager, använder Microsoft Hololens AR-glasögon. Forskarna genomförde ytterligare utvärderingar i större virtuella lager, med VR -teknik. De fann att deras ramverk effektivt kunde uppskatta lagerarbetarnas avsikter, med enastående precision.
"Jag tror att den mest meningsfulla aspekten av vår studie är att AR -enheter kan användas för mer än underhållning eller marknadsföring och faktiskt kan vara användbara i industriella miljöer, "Förskningsområdet är ganska nytt och det finns många möjligheter inom detta område, sa Puljiz."
I framtiden, algoritmen för uppskattning av mänskliga avsikter i realtid som utvecklats av Puljiz och hans kollegor kan öka säkerheten och effektiviteten hos lagerbaserade robotsystem. Till exempel, det kan hjälpa utvecklingen av mer mottagliga robotar som kan uppskatta avsikten med mänskliga operatörer runt dem, anpassa och planera sina rutter därefter.
"I framtida arbete, vi kunde utvidga algoritmen till 3D -utrymmen och följa blickriktningen i 3D för att bestämma, till exempel, om arbetaren har för avsikt att välja fel föremål eller om han är orolig för att en robot närmar sig, " sa Puljiz. "Det finns många andra möjligheter, inklusive handspårningsintegrationer. "
© 2018 Science X Network














