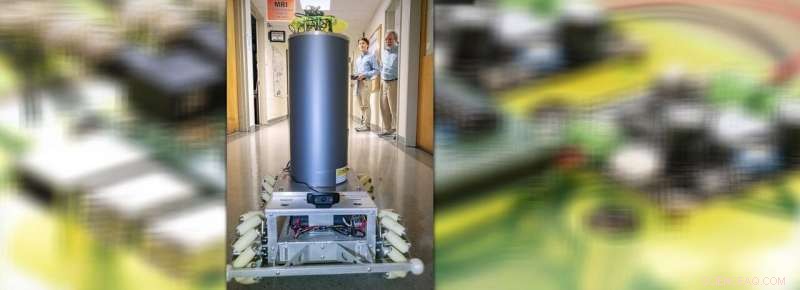
Detektorrobot i PPPL-hall före neutrontest. Bakom roboten från vänster, Harry Fetsch, Science Undergraduate Laboratory Intern (SULI) och Rob Goldston, medansvarig utredare för projektet. Kredit:Elle Starkman/PPPL Office of Communications
Tänk dig en svärm av autonoma, tre fots rullande robotar beväpnade med smarta detektorer för att stödja kärnvapensäkerhet och verifiera vapenkontrollavtal. Prototypen av sådana robotar, utvecklas av det amerikanska energidepartementets (DOE) Princeton Plasma Physics Laboratory (PPPL) och Princeton University, nyligen visat förmågan att identifiera källan till kärnstrålning och om den har avskärmats för att undvika upptäckt.
Detekteringen av neutroner från ett radioaktivt element i PPPL-testet avslutade ett tvåårigt projekt finansierat av det amerikanska utrikesdepartementet som också bidrar till DOE:s Consortium on Verification Technology. Den fjärrstyrda prototypen sätter scenen för vidareutveckling av en mobil och helt autonom svärm. "Demonstrationen gav total bekräftelse på robotens förmåga att upptäcka neutronkällan och gav vackra data, " sa PPPL fysiker Rob Goldston, en professor i astrofysiska vetenskaper vid Princeton University, och en huvudutredare i projektet.
"Allt utmärkt och lovande"
Co-rektor utredare Alex Glaser, en Princeton professor i teknik och meddirektör för Princeton Program in Science and Global Security, var lika översvallande. "Allt vi såg ser utmärkt och mycket lovande ut, ", sa han. "PPPL gav stort stöd för detta projekt."
Den nu kalibrerade "inspektörsboten" består av en cylinder av polyetenplast som innehåller tre neutronräknare ställda 120 grader isär och monterade på en robot med specialiserade hjul som gör att den kan röra sig i vilken riktning som helst. Detektorerna, designad av Goldston och Moritz Kütt, en före detta postdoktorand Princeton-forskare, ger både hög känslighet för energin hos detekterade neutroner och riktningen från vilken neutronerna kommer. Låg energi kan tyda på skärmning.
När roboten är färdigutvecklad kan den bli en del av en svärm av enheter som utför inspektionsuppgifter i olika typer av anläggningar. Föreslagna ansökningar kan omfatta:

Neutrondetektorrobot med utvecklare och medlemmar i PPPL Health Physics-teamet. Från vänster:Cathy Saville; Susan Thiel; Alex Glaser; Darren Thompson; Soha Aslam, Princeton University doktorand; Robert Hitchner; Rob Goldston; George Ascione; Andy Carpe; Patti Bruno. Said Goldston:"Jag är otroligt tacksam för professionalismen och stödet från Health Physics-teamet som hjälpte till att kalibrera roboten. En enorm beröm går också till Andy Carpe som guidade oss över alla typer av hinder." Kredit:Elle Starkman/PPPL Office of Communications
Programvara för maskininlärning
Nästa steg i utvecklingen inkluderar design av programvara för maskininlärning för att vägleda robotarna, och teknik för att robotarna ska kunna kommunicera med varandra under inspektioner. Systemet för artificiell intelligens (AI), ledd av chefsutredaren Naomi Leonard, Edwin S. Wilsey professor i maskin- och rymdteknik vid Princeton, använder det som kallas multi-armed bandit approach - ett statistiskt system som är uppkallat för att få de bästa resultaten från en serie spelautomater. Den viktigaste utmaningen i att leta efter odeklarerade aktiviteter är att göra ett klokt val mellan att fortsätta utforska och att sluta utnyttja små signaler som kan tyda på felaktigt beteende.
Idén till projektet går tillbaka till 2014 när Goldston och Mark Walker, en doktorand, hörde om ett annat laboratorium som installerade ett tak med neutrondetektorer som alla gick av när en lastbil som transporterade urangas för anrikning åkte förbi. Det ledde till tal om ett robotdetekteringssystem. "Jag sade, "Vad sägs om en robot?", mindes Goldston, och Mark sa:"vad sägs om en robot, det låter galet!"
Men Goldston uppmuntrades att undersöka detta alternativ i diskussioner med Internationella atomenergiorganets (IAEA) inspektörer och anläggningsoperatörer. Glaser lämnade in ett förslag till det amerikanska utrikesdepartementet med ett underkontrakt för PPPL för att konstruera och kalibrera en enskild inspektörsbot, vilket är vad laget har uppnått.
Hög växel
Projektet gick i högvarv förra sommaren. Harry Fetsch, en fysikstudent vid Harvey Mudd College i Science Undergraduate Laboratory Internship (SULI) vid PPPL, kört tusentals datortimmar för att simulera detektionssystemet. "Dessa simuleringar informerade utformningen av de experiment vi genomförde, " sa Glaser.
Goldston planerar nu att besöka DOE:s Savannah River Site kärnbränslefabrik för att undersöka möjligheten att testa inspektörsroboten i en anläggning där produktionen från anrikningsanläggningar går. "Vi vill se om vi kan mäta neutronerna som kommer ut ur autoklaverna, " sa han om enheter som används för att värma uran för att skicka det till tillverkningsanläggningen.
Med vidareutveckling, projektet skulle kunna visa "att enkla och robusta autonoma, mobil, riktnings- och spektralkänsliga neutrondetektorer skulle kunna tillhandahålla ett kostnadseffektivt sätt att tillhandahålla effektiv och effektiv verifiering, sa Goldston.