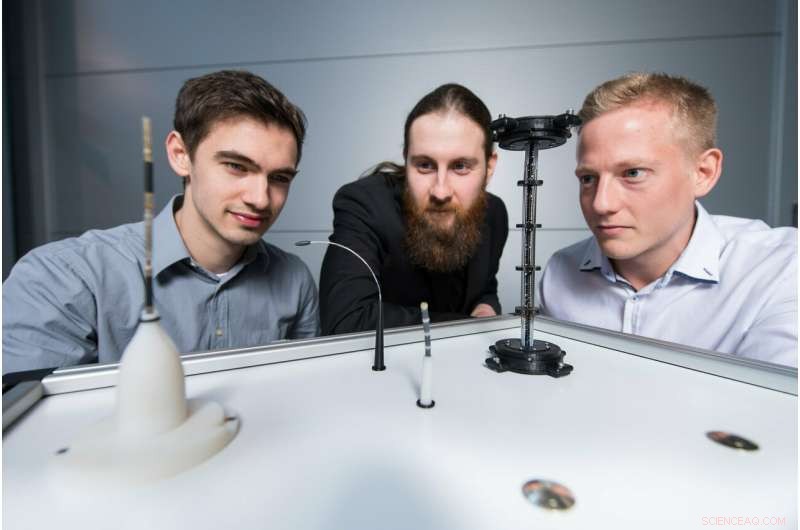
Dominik Scholtes (l.), Rouven Britz och Yannik Goergen (r.), doktorander i professor Seelekes team, med prototyper av de flexibla robotarmarna. Kredit:Oliver Dietze
Till skillnad från konventionella robotarmar med gångjärn och svängbara leder, nya flexibla armar som utvecklas av professor Stefan Seelecke och hans forskargrupp vid Saarlands universitet är konstruerade med hjälp av muskler gjorda av formminnetrådar som har förmågan att böja i nästan vilken riktning som helst och slingra sig runt hörn.
De flexibla armarna drivs elektriskt och klarar sig utan den vanliga pneumatiska utrustningen eller andra skrymmande tillbehör. Eftersom själva formminneslegeringen har sensoregenskaper, armarna kan styras utan behov av ytterligare sensorer. Den nya tekniken kan användas för att bygga stora robotarmar med flexibiliteten hos en elefants stam eller ultrafina tentakler för användning i endoskopiska operationer.
Från 1 till 5 april, forskargruppen kommer att vara på Hannover Messe, där de kommer att använda prototyper för att demonstrera förmågan hos formminnesarmarna vid Saarland Research and Innovation Stand. Seeleckes team söker partners som är intresserade av att utveckla tekniken för praktiska tillämpningar.
Det finns funktionella begränsningar för flexibiliteten hos både mänskliga armar och robotarmar. Lederna är ofta skrymmande och förbinder stela ben eller mekaniska sammansättningar. Rörelse är vanligtvis begränsad till vissa rumsliga riktningar. I kontrast, en elefantstammar och bläckfisk tentakler erbjuder mycket större smidighet. Närvaron av tiotusentals muskler gör det möjligt för dessa varelser att flytta stammen eller tentakeln i alla riktningar, att böja den i precis rätt grad och att greppa saker med stor kraft. Ingenjörerna vid Saarlands universitet har hämtat inspiration från dessa naturliga modeller och utvecklar robotarmar som eliminerar behovet av leder eller styva skelett eller ramar, skapa strukturer som är både lätta och extremt smidiga.
Professor Stefan Seelecke och hans team samarbetar med forskare från Darmstadts tekniska universitet för att utveckla tunna, exakt kontrollerade konstgjorda tentakler. I framtiden, systemet skulle kunna användas som styrtråd vid hjärtkirurgi eller som endoskop vid gastroskopiska och koloskopiska procedurer. Forskarna utrustar därför de konstgjorda tentaklarna med ytterligare funktioner som en gripare eller en spets med justerbar styvhet som ger en förbättrad tryckkraft. Men tekniken kan också skalas upp för att producera stora robotarmar som inte skiljer sig från en elefants stam.
Flexibiliteten hos dessa nya robotarmar kommer från de konstgjorda musklerna som används av forskargruppen i Saarbrücken. Dessa muskler består av ultrafina nickeltitan (nitinol) trådar som dras ihop och förlängs på ett kontrollerat sätt. De ultrafina nitinoltrådarna drar ihop sig som riktiga muskler, beroende på om en elektrisk ström flödar eller inte.
"Nickel-titan är det som kallas en formminneslegering, vilket innebär att den kan återgå till sin ursprungliga form efter att ha deformerats. Om en elektrisk ström flyter genom en nitinoltråd, materialet värms upp, vilket får den att anta en annan kristallstruktur med resultatet att tråden blir kortare. Om strömmen är avstängd, tråden svalnar och förlängs igen, "förklarar professor Seelecke.
Hans team vid Intelligent Material Systems Lab vid Saarlands universitet har skapat buntar av dessa trådar som fungerar som konstgjorda muskelfibrer. "Flera ultratunna trådar ger en stor yta genom vilken de kan överföra värme, vilket innebär att de drar ihop sig snabbare. Ledningarna har den högsta energitätheten av alla kända drivmekanismer. Och de kan utöva en mycket hög dragkraft över en kort sträcka, " förklarar Seelecke, som också forskar vid ZeMA—Center for Mechatronics and Automation Technology i Saarbrücken. Forskargruppen vid ZeMA utvecklar en rad applikationer för dessa ledningar, från nya kylsystem till nya typer av ventiler och pumpar.
För robotarmarna, forskarna länkar trådbuntarna så att de fungerar som flexor- eller extensormuskler, som, arbetar tillsammans, producera en flödande rörelse. "De tentakler som kan användas i framtiden som medicinska katetrar eller vid endoskopiska ingrepp har diametrar på endast cirka 300 till 400 mikrometer. Inget annat drivsystem är av jämförbar storlek. Tidigare system som använts för kateterprocedurer var betydligt större och detta tenderade att begränsa deras förmåga, "förklarar Paul Motzki, som skrev sin doktorsavhandling om formminnetrådarna och är forskningsassistent i professor Seelekes grupp.
De nya tentaklarna kan styras mycket exakt och kan användas för att skapa multifunktionella verktyg. Till exempel, den distala spetsen på tentakeln kan fås att utföra en tryckande rörelse. Det exakta rörelsemönster som krävs modelleras av forskarna och programmeras sedan på ett halvledarchip. Och systemet har inget behov av andra sensorer. Kablarna själva tillhandahåller all nödvändig data. "Materialet från vilket trådarna är gjorda har sensoriska egenskaper. Styrenheten kan tolka de elektriska motståndsdata så att den vet den exakta positionen och orienteringen av ledningarna vid varje tillfälle, säger Paul Motzki.
Till skillnad från konventionella robotarmar som kräver ström från en elmotor eller från ett pneumatiskt eller hydrauliskt system, armarna inte behöver någon sådan tung utrustning, bara elektrisk ström. "Detta gör systemet lätt, mycket anpassningsbar och tyst att använda, och det betyder att produktionskostnaderna är relativt låga, " säger professor Seelecke. Forskargruppen kommer att ställa ut sina systemprototyper på Hannover Messe och kommer att visa potentialen hos dessa nya kontinuumrobotarmar.