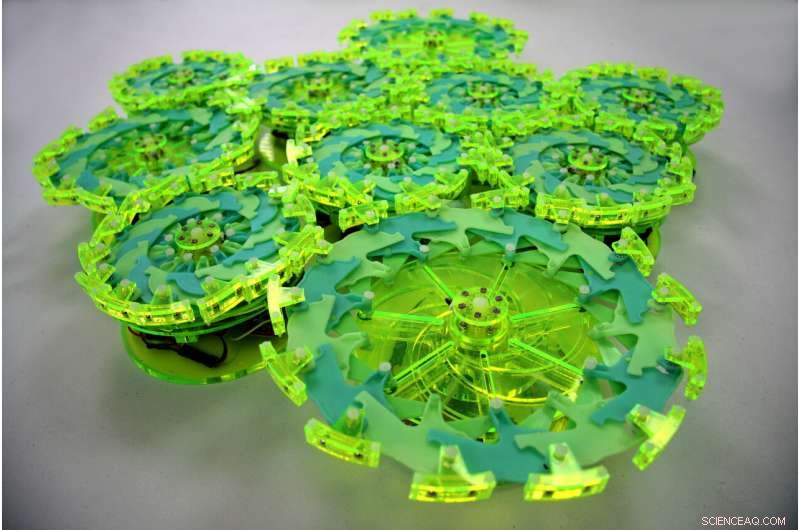
Forskare från MIT och andra håll har utvecklat beräkningsmässigt enkla robotar som ansluter i stora grupper för att flytta runt, transportera föremål, och slutföra andra uppgifter. Kredit:Felice Frankel
Att ta en signal från biologiska celler, forskare från MIT, Columbia University, och på andra håll har utvecklat beräkningsmässigt enkla robotar som ansluter i stora grupper för att flytta runt, transportera föremål, och slutföra andra uppgifter.
Detta så kallade "partikelrobotsystem" - baserat på ett projekt av MIT, Columbia Engineering, Cornell University, och forskare från Harvard University – omfattar många individuella skivformade enheter som det passande namnet "partiklar". Partiklarna är löst förbundna med magneter runt sina omkretsar. Varje partikel kan bara göra två saker:expandera och dra ihop sig. Men den motionen, när noggrant tajmas, tillåter de enskilda partiklarna att trycka och dra varandra i koordinerad rörelse. Inbyggda sensorer gör att klustret kan dras mot ljuskällor.
I en Natur papper, forskarna visar ett kluster av två dussin riktiga robotpartiklar och en virtuell simulering på upp till 100, 000 partiklar som rör sig genom hinder mot en glödlampa. De visar också att en partikelrobot kan transportera föremål som placeras mitt i den.
Partikelrobotar kan formas i många konfigurationer och navigera smidigt runt hinder och tränger sig igenom trånga luckor. I synnerhet, ingen av partiklarna kommunicerar direkt med eller förlitar sig på varandra för att fungera, så partiklar kan adderas eller subtraheras utan att det påverkar gruppen. I deras tidning, forskarna visar partikelrobotsystem kan utföra uppgifter även när många enheter inte fungerar.
Tidningen representerar ett nytt sätt att tänka om robotar, som traditionellt är utformade för ett ändamål, består av många komplexa delar, och sluta fungera när någon del inte fungerar. Robotar som består av dessa enkla komponenter, forskarna säger, skulle kunna möjliggöra mer skalbart, flexibel, och robusta system.
"Vi har små robotceller som inte är så kapabla som individer men som kan åstadkomma mycket som grupp, säger Daniela Rus, direktör för datavetenskap och artificiell intelligens Laboratory (CSAIL) och Andrew och Erna Viterbi professor i elektroteknik och datavetenskap. "Roboten i sig är statisk, men när den ansluter till andra robotpartiklar, helt plötsligt kan robotkollektivet utforska världen och kontrollera mer komplexa handlingar. Med dessa 'universella celler, ' robotpartiklarna kan uppnå olika former, global omvandling, global rörelse, globalt beteende, och, som vi har visat i våra experiment, följ ljusgradienter. Det här är väldigt kraftfullt."
Med Rus på tidningen är:första författare Shuguang Li, en CSAIL postdoc; co-första författare Richa Batra och motsvarande författare Hod Lipson, båda av Columbia Engineering; David Brown, Hyun-Dong Chang, och Nikhil Ranganathan från Cornell; och Chuck Hoberman från Harvard.
På MIT, Rus har arbetat med modulära, uppkopplade robotar i nästan 20 år, inklusive en expanderande och sammandragande kubrobot som kan ansluta till andra för att flytta runt. Men den fyrkantiga formen begränsade robotarnas grupprörelse och konfigurationer.
I samarbete med Lipsons labb, där Li var doktorand tills han kom till MIT 2014, forskarna gick efter skivformade mekanismer som kan rotera runt varandra. De kan också ansluta och koppla från varandra, och bildas i många konfigurationer.
Varje enhet i en partikelrobot har en cylindrisk bas, som rymmer ett batteri, en liten motor, sensorer som känner av ljusintensitet, en mikrokontroller, och en kommunikationskomponent som skickar ut och tar emot signaler. Ovanpå monterad är en barnleksak som kallas Hoberman Flight Ring – dess uppfinnare är en av tidningens medförfattare – som består av små paneler sammankopplade i en cirkulär formation som kan dras för att expandera och tryckas tillbaka för att dra ihop sig. Två små magneter är installerade i varje panel.
Tricket var att programmera robotpartiklarna att expandera och dra ihop sig i en exakt sekvens för att trycka och dra hela gruppen mot en målljuskälla. Att göra så, forskarna utrustade varje partikel med en algoritm som analyserar utsänd information om ljusintensitet från varannan partikel, utan behov av direkt partikel-till-partikel-kommunikation.
Sensorerna för en partikel känner av ljusintensiteten från en ljuskälla; ju närmare partikeln är ljuskällan, desto större intensitet. Varje partikel sänder hela tiden en signal som delar sin upplevda intensitetsnivå med alla andra partiklar. Säg att ett partikelrobotsystem mäter ljusintensiteten på en skala från nivåerna 1 till 10:Partiklarna närmast ljuset registrerar en nivå 10 och de längst bort kommer att registrera nivå 1. Intensitetsnivån, i tur och ordning, motsvarar en specifik tid som partikeln måste expandera. Partiklar som upplever den högsta intensiteten - nivå 10 - expanderar först. När dessa partiklar drar ihop sig, nästa partiklar i ordning, nivå 9, expandera sedan. Den tidsinställda expanderande och sammandragande rörelsen sker på varje efterföljande nivå.
Partikelrobotar är sammansatta av löst kopplade komponenter, eller partiklar, som saknar en individuell identitet eller adresserbar position. De är kapabla till endast en enkel rörelse - expansion och sammandragning. Dock, när en grupp av partiklar koordineras för att röra sig som ett kollektiv, intressant beteende observeras. Även i amorfa konfigurationer, partikelrobotar utnyttjar statistiska mekaniska fenomen för att producera rörelse. Kredit:Shuguang Li/Columbia Engineering
"Detta skapar en mekanisk expansions-kontraktionsvåg, en samordnad tryckande och dragande rörelse, som flyttar ett stort kluster mot eller bort från miljöstimuli, " säger Li. Nyckelkomponenten, Li tillägger, är den exakta timingen från en delad synkroniserad klocka bland partiklarna som möjliggör rörelse så effektivt som möjligt:"Om du förstör den synkroniserade klockan, systemet kommer att fungera mindre effektivt."
I videor, forskarna visar ett partikelrobotsystem som består av riktiga partiklar som rör sig och ändrar riktning mot olika glödlampor när de tänds, och arbeta sig igenom ett gap mellan hindren. I deras tidning, forskarna visar också att simulerade kluster på upp till 10, 000 partiklar upprätthåller rörelse, med halva hastigheten, även om upp till 20 procent av enheterna misslyckades.
"Det är lite som det ökända "gråa goo, " säger Lipson, professor i maskinteknik vid Columbia Engineering, hänvisar till science-fiction-konceptet för en självreplikerande robot som består av miljarder nanobotar. "Nyckelnyheten här är att du har en ny typ av robot som inte har någon centraliserad kontroll, ingen enda punkt av misslyckande, ingen fast form, och dess komponenter har ingen unik identitet."
Nästa steg, Lipson tillägger, miniatyriserar komponenterna för att göra en robot som består av miljontals mikroskopiska partiklar.