Tribotrobotar har fem förflyttningsstrategier. Kredit:Zhenishbek Zhakypov / EPFL
Individuellt, myror har bara så mycket styrka och intelligens, men som en koloni kan de använda komplexa strategier för att slutföra sofistikerade uppgifter och undvika större rovdjur.
På EPFL, robotforskare vid professor Jamie Paiks laboratorium har återskapat detta fenomen, utveckla små robotar som uppvisar minimal fysisk intelligens på individuell nivå men som kan kommunicera och agera kollektivt. Trots att den är enkel i designen och väger endast 10 gram, varje robot har flera rörelselägen för att navigera på vilken typ av yta som helst. Kollektivt, de kan snabbt upptäcka och övervinna hinder och flytta föremål som är mycket större och tyngre än de själva. Den relaterade forskningen har publicerats i Natur .
Robotar inspirerade av fällmyror
Dessa trebenta, T-formade origamirobotar kallas Tribots. De kan monteras på bara några minuter genom att vika en bunt tunna, ark av flera material, vilket gör dem lämpliga för massproduktion. Helt självständig och obunden, Tribots är utrustade med infraröda och närhetssensorer för detektions- och kommunikationsändamål. De skulle kunna rymma ännu fler sensorer beroende på applikation.
"Deras rörelser är modellerade efter Odontomachus-myrors. Dessa insekter kryper normalt, men för att undkomma ett rovdjur, de knäpper ihop sina kraftfulla käkar för att hoppa från löv till löv, säger Zhenishbek Zhakypov, första författaren. Tribots replikerar denna katapultmekanism genom en elegant origami-design som kombinerar flera ställdon av legerat formminne. Som ett resultat, en enda robot kan producera fem distinkta rörelsegångar:vertikala hopp, horisontell hoppning, kullerbytta för att ta bort hinder, gå i strukturerad terräng och krypa på plana ytor – precis som dessa kreativt motståndskraftiga myror.
Roller:Ledare, arbetare och utforskare
Trots att de har samma anatomi, varje robot tilldelas en specifik roll beroende på situationen. "Utforskare" upptäcker fysiska hinder i deras väg, som föremål, dalar och berg. Efter att ha upptäckt ett hinder, de informerar resten av gruppen. Sedan, "ledaren" ger instruktionerna. Arbetarna, 'under tiden, samla sina krafter för att flytta föremål. "Varje Tribot, precis som Odontomachus myror, kan ha olika roller. Dock, de kan också ta nya roller omedelbart när de står inför ett nytt uppdrag eller en okänd miljö, eller till och med när andra medlemmar går vilse. Detta går utöver vad riktiga myror kan göra, säger Paik.
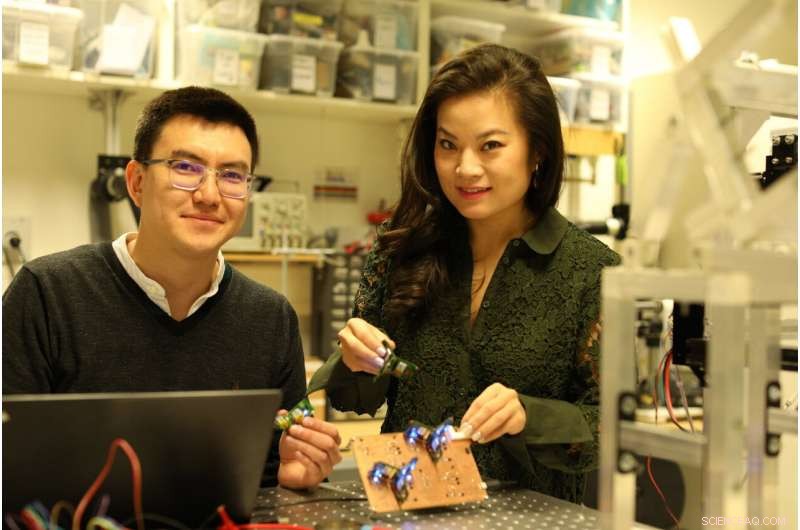
Zhenishbek Zhakypov och Jamie Paik i labbet, håller i några tribotar. Kredit:Marc Delachaux / EPFL
Framtida applikationer
I praktiska situationer, som ett nödsökningsuppdrag, Tribots kunde sättas in i massor. Och tack vare deras multi-lokomotiv och multi-agent kommunikationskapacitet, de kunde lokalisera ett mål snabbt över en stor yta utan att förlita sig på GPS eller visuell feedback. "Eftersom de kan tillverkas och distribueras i stort antal, att ha några "förluster" skulle inte påverka framgången för uppdraget, " tillägger Paik."
"Med deras unika kollektiva intelligens, våra små robotar kan visa bättre anpassningsförmåga till okända miljöer; därför, för vissa uppdrag, de skulle prestera bättre, kraftfullare robotar."