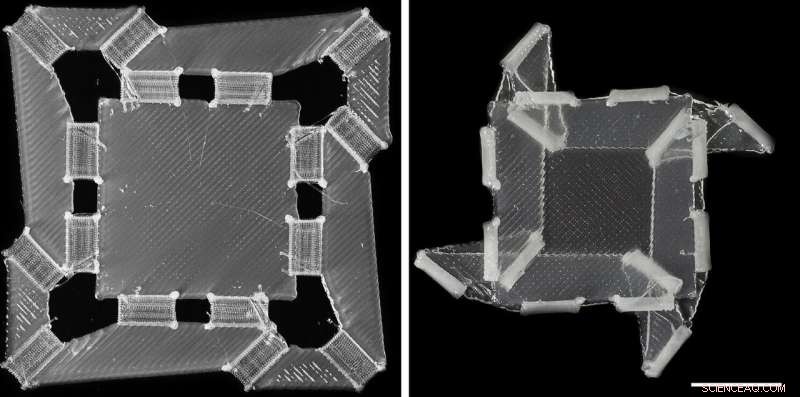
Fyrkantig origami -enhet. Upphovsman:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
Majoriteten av mjuka robotar idag förlitar sig på extern kraft och kontroll, hålla dem bundna till off-board system eller riggade med hårda komponenter. Nu, forskare från Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) och Caltech har utvecklat mjuka robotsystem, inspirerad av origami, som kan röra sig och ändra form som svar på yttre stimuli, banar väg för helt obundna mjuka robotar.
Forskningen publiceras i Science Robotics .
"Möjligheten att integrera aktiva material i 3D-tryckta objekt möjliggör design och tillverkning av helt nya klasser av mjuk robotmaterial, "sa Jennifer A. Lewis, Hansjorg Wyss, professor i biologiskt inspirerad teknik vid SEAS och medförfattare till studien.
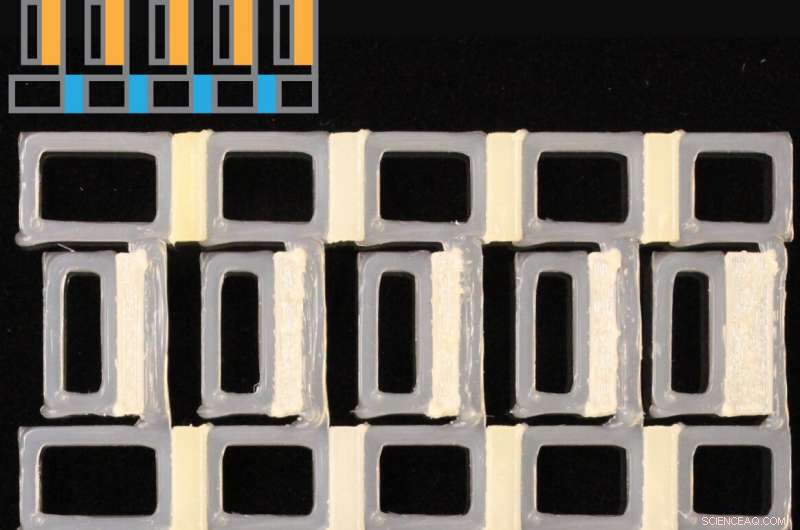
Forskarna vände sig till origami för att skapa multifunktionella mjuka robotar. Genom sekventiella veck, origami kan koda flera former och funktioner i en enda struktur. Använda material som kallas flytande kristallelastomerer som ändrar form när de utsätts för värme, forskargruppen 3D-tryckt två typer av mjuka gångjärn som fälls vid olika temperaturer och därmed kan programmeras att vikas i en specifik ordning.
"Med vår metod för 3D-utskrift av aktiva gångjärn, vi har full programmerbarhet över temperaturrespons, mängden vridmoment som gångjärnen kan utöva, deras böjningsvinkel, och vik orientering. Vår tillverkningsmetod underlättar integrering av dessa aktiva komponenter med andra material, "sa Arda Kotikian, en doktorand vid SEAS och Graduate School of Arts and Sciences och medförfattare till artikeln.
"Att använda gångjärn gör det lättare att programmera robotfunktioner och kontrollera hur en robot kommer att ändra form. I stället för att hela en mjuk robot deformeras på sätt som kan vara svåra att förutsäga, du behöver bara programmera hur några små delar av din struktur kommer att reagera på temperaturförändringar, "sa Connor McMahan, en doktorand på Caltech och medförfattare till tidningen.
För att demonstrera denna metod, Kotikian, McMahan, och teamet byggde flera mjuka enheter, inklusive en obunden mjuk robot med namnet "Rollbot". Rollbot börjar som ett platt ark, cirka 8 centimeter lång och 4 centimeter bred. När den placeras på en het yta, cirka 200 ° C, en uppsättning gångjärn fälls och roboten kryper ihop till ett femkantigt hjul.
En annan uppsättning gångjärn är inbäddad på var och en av hjulets fem sidor. Ett gångjärn fälls vid kontakt med den heta ytan, driver hjulet för att svänga till nästa sida, där nästa gångjärn fälls. När de rullar av den heta ytan, gångjärnen fälls ut och är redo för nästa cykel.
"Många befintliga mjuka robotar kräver en koppling till externa kraft- och styrsystem eller begränsas av mängden kraft de kan utöva. Dessa aktiva gångjärn är användbara eftersom de tillåter mjuka robotar att arbeta i miljöer där tetrar är opraktiska och att lyfta föremål många gånger tyngre än gångjärnen, sa McMahan.
En annan enhet, när den placeras i en varm miljö, kan vikas till en kompakt vikt form som liknar ett gem och fälls ut när den kyls.
"Dessa obundna strukturer kan passivt kontrolleras, "sa Kotikian." Med andra ord, allt vi behöver göra är att utsätta strukturerna för specifika temperaturmiljöer och de kommer att svara efter hur vi programmerade gångjärnen. "
Medan denna forskning bara fokuserade på temperaturresponser, flytande kristallelastomerer kan också programmeras att reagera på ljus, pH, fukt och andra yttre stimuli.
Självgående Rollbot visas i sin tryckta konfiguration (ovan) och i sin vikta konfiguration (nedan). Upphovsman:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
"Detta arbete visar hur kombinationen av responsiva polymerer i en arkitekterad komposit kan leda till material med självaktivering som svar på olika stimuli. I framtiden kommer sådana material kan programmeras för att utföra allt mer komplexa uppgifter, suddig ut gränserna mellan material och robotar, "sa Chiara Daraio, Professor i maskinteknik och tillämpad fysik vid Caltech och medförfattare till studien.














