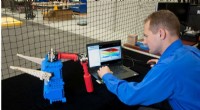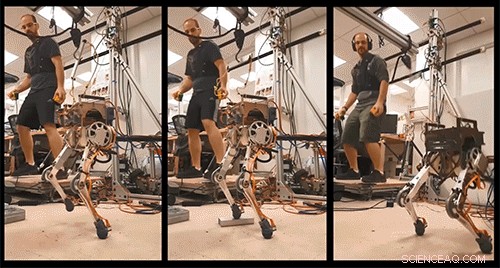
Joao Ramos teleopererar Little HERMES, en tvåfotsrobot som kan efterlikna en operatörs balans för att hålla sig upprätt medan du springer, gående, och hoppar på plats. Kredit:Joao Ramos och Sangbae Kim
Rädda offer från en brinnande byggnad, ett kemikalieutsläpp, eller någon katastrof som är otillgänglig för människor som svarar kan en dag bli ett uppdrag för motståndskraftiga, anpassningsbara robotar. Tänka, till exempel, räddningsrobotar som kan ta sig genom spillror på alla fyra, res dig sedan upp på två ben för att skjuta undan ett tungt hinder eller bryta igenom en låst dörr.
Ingenjörer tar framsteg när det gäller designen av fyrbenta robotar och deras förmåga att springa, hoppa och till och med göra backflips. Men att bli tvåbent, mänskliga robotar att utöva kraft eller trycka mot något utan att falla har varit en betydande stötesten.
Nu har ingenjörer vid MIT och University of Illinois i Urbana-Champaign utvecklat en metod för att kontrollera balansen hos en tvåbent, teleopererad robot – ett viktigt steg mot att göra det möjligt för en humanoid att utföra kraftfulla uppgifter i utmanande miljöer.
Teamets robot, fysiskt liknar en maskinbearbetad bål och två ben, fjärrstyrs av en mänsklig operatör som bär en väst som överför information om människans rörelse och markreaktionskrafter till roboten.
Genom västen, den mänskliga operatören kan både styra robotens rörelse och känna robotens rörelser. Om roboten börjar välta, människan känner ett motsvarande drag i västen och kan anpassa sig på ett sätt för att balansera både sig själv och, synkront, roboten.
I experiment med roboten för att testa denna nya "balansåterkoppling"-metod, forskarna kunde på distans upprätthålla robotens balans när den hoppade och gick på plats i synk med sin mänskliga operatör.
"Det är som att springa med en tung ryggsäck - du kan känna hur dynamiken i ryggsäcken rör sig runt dig, och du kan kompensera ordentligt, " säger Joao Ramos, som utvecklade tillvägagångssättet som postdoc vid MIT. "Om du nu vill öppna en tung dörr, människan kan beordra roboten att kasta sin kropp mot dörren och trycka upp den, utan att tappa balansen."
Ramos, som nu är biträdande professor vid University of Illinois i Urbana-Champaign, har beskrivit tillvägagångssättet i en studie som visas i Vetenskapsrobotik . Hans medförfattare till studien är Sangbae Kim, docent i maskinteknik vid MIT.
Mer än rörelse
Tidigare, Kim och Ramos byggde den tvåbenta roboten HERMES (för Highly Efficient Robotic Mechanisms and Electromechanical System) och utvecklade metoder för att efterlikna en operatörs rörelser via teleoperation, ett tillvägagångssätt som forskarna säger kommer med vissa humanistiska fördelar.
"Eftersom du har en person som kan lära sig och anpassa sig i farten, en robot kan utföra rörelser som den aldrig har övat förut [via teleoperation], säger Ramos.
I demonstrationer, HERMES har hällt upp kaffe i en kopp, använde en yxa för att hugga ved, och hanterade en brandsläckare för att släcka en brand.
Alla dessa uppgifter har involverat robotens överkropp och algoritmer för att matcha robotens lempositionering med operatörens. HERMES kunde utföra kraftiga rörelser eftersom roboten var rotad på plats. Balans, i dessa fall, var mycket enklare att underhålla. Om roboten var tvungen att vidta några åtgärder, dock, det skulle troligen ha tippat över i ett försök att efterlikna operatörens rörelser.
"Vi insåg att för att generera höga krafter eller flytta tunga föremål, att bara kopiera rörelser skulle inte vara tillräckligt, eftersom roboten skulle falla lätt, " säger Kim. "Vi behövde kopiera operatörens dynamiska balans."
Gå in i lilla HERMES, en miniatyrversion av HERMES som är ungefär en tredjedel så stor som en genomsnittlig vuxen människa. Teamet konstruerade roboten som helt enkelt en bål och två ben, och designade systemet specifikt för att testa underkroppsuppgifter, som rörelse och balans. Som med sin motsvarighet för hela kroppen, Little HERMES är designad för teleoperation, med en operatör anpassad i en väst för att kontrollera robotens handlingar.
För att roboten ska kopiera operatörens balans snarare än bara deras rörelser, laget måste först hitta ett enkelt sätt att representera balans. Ramos insåg så småningom att balansen kunde avskalas till två huvudingredienser:en persons massacentrum och deras tryckcentrum - i princip, en punkt på marken där en kraft som motsvarar alla stödkrafter utövas.
Masscentrums placering i förhållande till tryckcentrum, Ramos hittade, relaterar direkt till hur balanserad en person är vid varje given tidpunkt. Han fann också att positionen för dessa två ingredienser fysiskt kunde representeras som en inverterad pendel. Föreställ dig att du svajar från sida till sida samtidigt som du håller dig rotad på samma plats. Effekten liknar svängningen av en upp och nedvänd pendel, den övre änden representerar en människas massacentrum (vanligtvis i bålen) och den nedre representerar deras tryckcentrum på marken.
Tunga lyft
För att definiera hur masscentrum relaterar till tryckcentrum, Ramos samlade in mänskliga rörelsedata, inklusive mätningar i labbet, där han svajade fram och tillbaka, gick på plats, och hoppade på en kraftplatta som mätte krafterna han utövade på marken, som positionen för hans fötter och bål registrerades. Han kondenserade sedan dessa data till mätningar av masscentrum och tryckcentrum, och utvecklade en modell för att representera varandra i förhållande till varandra, som en inverterad pendel.
Han utvecklade sedan en andra modell, liknar modellen för mänsklig balans men skalad till de mindre dimensionerna, lättare robot, och han utvecklade en kontrollalgoritm för att länka och möjliggöra feedback mellan de två modellerna.
Forskarna testade denna balansåterkopplingsmodell, först på en enkel inverterad pendel som de byggde i labbet, i form av en balk ungefär lika hög som Lilla HERMES. De kopplade strålen till sitt teleoperationssystem, och den svajade fram och tillbaka längs ett spår som svar på en operatörs rörelser. När operatören svajade åt sidan, strålen gjorde likadant - en rörelse som operatören också kunde känna genom västen. Om strålen svajade för långt, operatören, känna dragningen, kan luta åt andra hållet för att kompensera, och håll strålen balanserad.
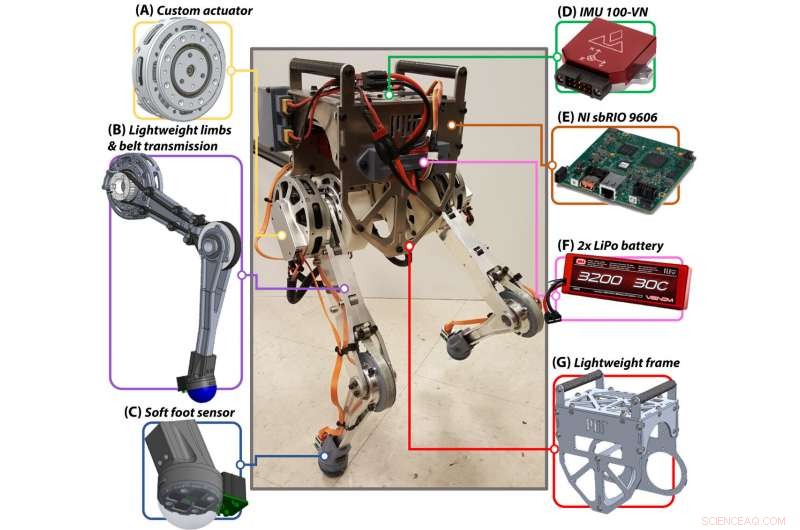
Den tvåfota roboten Little HERMES. Kredit:Ramos och Kim, Sci. Robot. 4, eaav4282 (2019)
Experimenten visade att den nya återkopplingsmodellen kunde fungera för att upprätthålla balansen på strålen, så forskarna provade sedan modellen på Little HERMES. De utvecklade också en algoritm för roboten att automatiskt översätta den enkla balansmodellen till de krafter som var och en av dess fötter skulle behöva generera, att kopiera operatörens fötter.
I labbet, Ramos upptäckte att när han bar västen, han kunde inte bara kontrollera robotens rörelser och balans, men han kunde också känna robotens rörelser. När roboten slogs med en hammare från olika håll, Ramos kände hur västen ryckte i den riktning som roboten rörde sig. Ramos motstod instinktivt bogserbåten, som roboten registrerade som en subtil förskjutning i masscentrum i förhållande till tryckcentrum, vilket det i sin tur härmade. Resultatet var att roboten kunde hålla sig från att välta, även under upprepade slag mot kroppen.
Lille HERMES härmade också Ramos i andra övningar, inklusive att springa och hoppa på plats, och går på ojämn mark, allt samtidigt som den behåller sin balans utan hjälp av tjuder eller stöd.
"Balansåterkoppling är en svår sak att definiera eftersom det är något vi gör utan att tänka, " säger Kim. "Detta är första gången balansåterkoppling är korrekt definierad för de dynamiska åtgärderna. Detta kommer att förändra hur vi styr en fjärropererad humanoid."
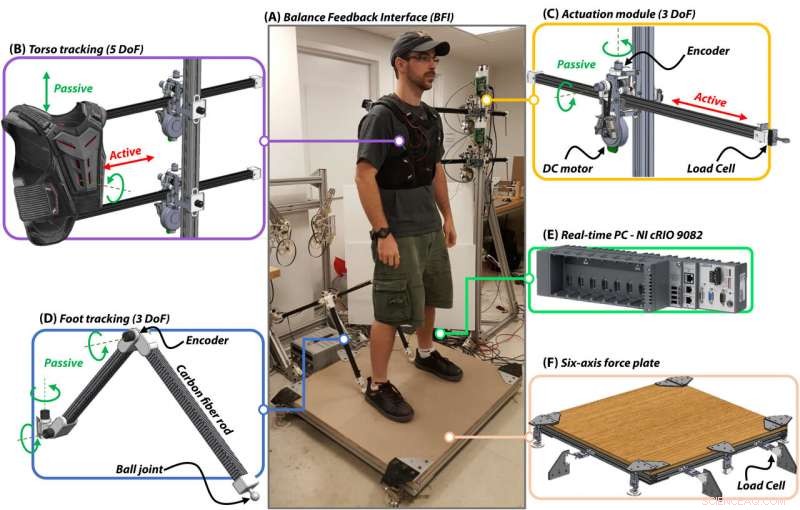
Teleoperationsgränssnittet för den mänskliga operatören. Kredit:Ramos och Kim, Sci. Robot. 4, eaav4282 (2019)
Kim och Ramos kommer att fortsätta arbeta med att utveckla en helkroppshumanoid med liknande balanskontroll, att en dag kunna galoppera genom en katastrofzon och resa sig upp för att skjuta undan barriärer som en del av räddnings- eller räddningsuppdrag.
"Nu kan vi göra tunga dörröppningar eller lyfta eller kasta tunga föremål, med korrekt balanskommunikation, " säger Kim.