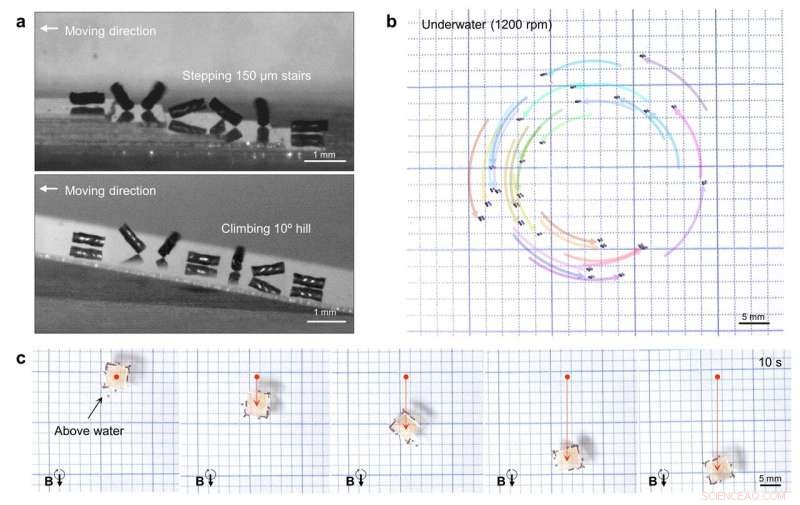
Hierarkisk magnetomotilitet som drivs av roterande och roterande rörelser av spiralformade magnetiska mjuka robotar tillåter (a) klättring över hinder, (b) undervattenssimning av flera mjuka robotar, och (c) kollektiv transport av last via en enda roterande axel av permanentmagneter. Kredit:Inha University
Magnetiska mjuka robotar är ett lovande alternativ för kontaktlös kontroll i trånga miljöer via externa magnetiska stimuli. Magneto-inducerade rörelser, dvs. magnetomotilitet, drivs av lokal deformation av en robot varvid partikelinriktningar och alternerande polära fördelningar programmeras in i kroppen. Försök att programmera magnetisk anisotropi i de mjuka robotarna har utförts genom direkt laserutskrift (DLP), stereolitografi (SLA) och fused filament fabrication (FDM) kombinerat med multiaxiell manipulation av elektromagneter.
Nu, forskare har visat enkla förberedelse- och aktiveringsmetoder för magnetiska mjuka robotar utan elektromagnetisk reglering. De konstruerade en tredimensionell spiralformad mjuk robot genom vridning av en tvådimensionell polymerkompositfilm. Termoplastiska polyuretan-magnetit nanokompositer möjliggjorde supervridning av filmerna på grund av hög töjning; användningen av termoplastiska material gjorde det också möjligt för den vridna arkitekturen att fixeras termiskt. Den täta spiralformade kroppen av magnetiska mjuka robotar tillät hierarkisk magnetomotilitet, inklusive medurs rotationer och moturs rotationer som är resultatet av två permanentmagneter med en enda rotationsaxel som roterar medurs under substraten.
Vid magnetisk manipulation av flera mjuka robotar, kontroll av den individuella roboten förblir en intrikat manöver eftersom respektive bana för varje robot samtidigt koordineras längs olika vägar. Batterifri drift av dessa multipla magnetiska mjuka robotar utfördes genom variationer i frekvenser av de roterande magneterna i planet, eftersom mjuka robotar med olika bildförhållande aktiverades med andra rotationslägen – roterande, vridande, och tumlande – även vid identisk rotationshastighet. Förutom orbital manövrering av radier, hastigheter, och vägar för de många mjuka robotarna, smidig förflyttning upp till 60 kroppslängder s-1 och hierarkisk magnetomotilitet hjälpte de mjuka robotarna att klättra på hinder som trappor, kullar och skrynkliga ytor under en evigt roterande magnetisk källa och utan flerriktad reglering av magnetfält.
Forskarna visade också samarbete mellan flera magnetiska mjuka robotar inspirerade av den kollektiva kvaliteten på godstransporter i myrkolonier. Kollektivt beteende är en vanlig observation i naturen med exempel på cellmigration, myrkolonier, och fiskstim, för att nämna några. Dock, det är svårt att uppnå denna design i kollektiva robotar eftersom dynamiken i både individuella och kollektiva robotrörelser måste optimeras från både beräknings- och experimentella analyser. Dessa krav blir onödiga i denna studie, eftersom kapillärkrafter verkar för att fästa de roterande och roterande mjuka robotarna runt lasten. Förflyttningen av magneterna under robotarna resulterar i underlättad transport av tunga föremål som liknar myrors arbetsbeteende.
Dessa nya tekniker för on-demand orbital manövrering via hierarkisk magnetomotilitet kan utökas för biomedicinska applikationer där miniatyriserade magnetiska simmare potentiellt kan leverera droger till utrymmen med komplexa konfigurationer.