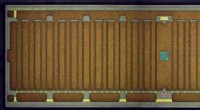
Flygrummet är en automatiserad miljö där fladdermöss kan flyga och förhandla utrymme i en kontrollerad miljö. Fladdermusens flygbeteende i det här rummet spåras automatiskt med hjälp av ett stort antal höghastighetskameror som du kan se på bilden. Kredit:University of California - Berkeley
Fruktfladdermöss är inte de första orden man tänker på när man tänker på förarlösa bilar. Men i sina nattliga utflykter efter frukt och nektar löser de rutinmässigt många av de tekniska utmaningarna som har stoppat ansträngningarna att utveckla säkra, pålitliga och effektiva autonoma fordon.
Fladdermössens navigationssystem designades av världens främsta ingenjör:evolution. Michael Yartsev, biträdande professor i bioteknik och neurovetenskap, studerar mönstren av ledningar och eld i fladdermössens hjärnor som naturen har tänkt ut för att ta dem härifrån till dit i beckmörkret. Och utan att flyga in i hinder eller varandra.
Bakar Fellows-programmet stödjer en ny ansträngning i hans labb för att översätta fladdermössens neurologiska "färdregler" till beräkningsalgoritmer för att styra utvecklingen av navigationssystem för förarlösa bilar.
Dr. Yartsev beskriver de neurobiologiska principer som hans labb har avslöjat och hur insikterna kan ge en färdplan för framtiden.
F. Hur bestämde du dig för att fokusera på ekolokalisering av fladdermöss som en modell för att konstruera autonoma fordon?
S. Jag började arbeta med fruktfladdermöss för min doktorsexamen. i Israel. Jag var intresserad av den neurala grunden för rumslig representation och navigering, och ekolokalisering av fladdermöss är ett underbart system för att utforska detta.
De kan upptäcka objekt med en mycket fin upplösning, medan de flyger i hastigheter upp till 100 miles per timme. De har utvecklat överlägsna förmågor för exakt avkänning, perception och rörelse – inte bara som individer utan också som en del av en grupp.
F. Hur ledde denna grundläggande neurovetenskapliga forskning dig till förarlösa bilar?
S. För några år sedan började jag lära mig om den autonoma fordonsindustrin, och jag insåg att det finns mycket vi skulle kunna bidra med. Men det blev verkligen praktiskt först med stöd av mitt Bakar Fellowship.
F. Är dessa fladdermöss verkligen blinda som man säger?
S. Nej, hela frasen "blind as a bat" är fel. Våra fladdermöss — egyptiska fruktfladdermöss — har också ett högt utvecklat visuellt system. De är ganska fantastiska på både ekolokalisering och synskärpa. De använder ekolokalisering för att navigera på natten.
F. Hur går du tillväga för att studera fladdermöss i mörkret?
S. Vi har designat helautomatiska flygrum där fladdermöss kan flyga fritt. Vi studerar deras ekolodsmönster med hjälp av ultraljudsmikrofoner. Vi upptäcker deras egna sändningar – deras ekolokaliseringsklick. Hela systemet är trådlöst.
F. Att ta sig från punkt A till punkt B är bara hälften av utmaningen för autonoma bilar, eller hur?
A. Ja, det stämmer. Autonoma fordon måste navigera med precision, men också svara på trafikförhållandena – på närhet, hastighet och riktning för andra förarlösa bilar. Detta är vad vi kallar kollektivt beteende. Dagens teknik har inte kommit på hur man löser problemet med kommunikation mellan fordon. Bilarna behandlas som individer som navigerar i sin miljö.
För att studera denna mer komplexa förmåga kan vi låta fladdermöss flyga tillsammans och navigera till sina mål.
F. Vad har du lärt dig om kablarna i deras hjärnor som gör att de kollektivt kan flyga blinda?
A. De senaste ansträngningarna som vårt labb har varit involverade i lyckades kartlägga stora delar av fladdermushjärnans cortex. Vi har kunnat identifiera den exakta platsen för neuronens signalerings- och perceptionscentra för ekolokalisering. Med hjälp av trådlösa neurofysiologiska system kan vi registrera neurala signaler från dessa områden.
När vi dessutom började titta på det neurologiska beteendet hos fladdermöss som interagerar som grupper, blev vi förvånade över att finna att de har en intressant nivå av synkronitet mellan hjärnan. Det finns ett speciellt frekvensområde i hjärnans aktivitet där denna synkronisering blir mest uttalad.
Detta ger förmodligen den optimala balansen mellan signalstyrka och hastighet för att navigera och kommunicera nästan felfritt. Samma problem kommer att behöva lösas när många autonoma fordon är på vägen. De behöver effektivt kommunicera information till varandra och vi vet för närvarande inte vad som är det mest optimala sättet att göra det. Evolution kan kasta ett viktigt ljus över detta.
F. Hur kan denna upptäckt informera utvecklingen av autonoma fordon?
S. Det kan vägleda oss att identifiera den bästa ekolodsfrekvensen samt det optimala frekvensbandet för bilar att kommunicera med varandra mest effektivt. För självkörande bilar vill du inte ha ett navigationssystem som är 95 % exakt. Du behöver 99,99999999%. Du behöver en Ferrari-nivå av precision, inte en budgetbil.
Varje siffra över 99 % är beräkningsmässigt kostsam att utveckla. Visuella sensorer med den precisionsnivån skulle vara mycket kostsamma. Men visuell i.d. är också viktigt. Vi ser de två modaliteterna som komplementära.
F. Hur har den autonoma fordonsindustrin reagerat på ditt arbete?
S. Jag har aldrig arbetat en dag i mitt liv inom industrin. Bakar Fellows-programmet låter mig ha en fram och tillbaka med utvecklarna av autonoma fordon. Det kan fokusera vår forskning så att vi verkligen kan bidra. Utan den feedbacken skulle vi liksom snurra på våra hjul.