Från vänster till höger:Sina Bahrami, Mehdi Nourinejad och professor Matthew Roorda designade en algoritm för att optimera utformningen av parkeringsplatser för autonoma fordon, öka sin kapacitet med i genomsnitt 62 procent. Kredit:Roberta Baker
Ny U of T Engineering-forskning visar att införandet av självkörande bilar – även känd som autonoma fordon (AV) – avsevärt kan minska mängden värdefullt stadsutrymme avsett för parkering.
"På en parkeringsplats full av AV-apparater, du behöver inte öppna dörrarna, så att de kan parkera med väldigt lite utrymme däremellan, " säger professor Matthew Roorda, senior författare till en ny studie i Transportforskning del B . "Du behöver inte heller lämna utrymme för varje bil att köra ut, eftersom du kan signalera de omgivande AV:erna att röra sig ur vägen."
Medan traditionella parkeringsplatser är konfigurerade för "öar" av bilar som var och en kan dra in eller ut från en plats, en AV-parkering kan likna ett solidt rutnät, med yttre bilar som flyttar åt sidan efter behov för att låta de inre bilarna komma in och ut. Forskarnas utmaning var att bestämma den optimala storleken på nätet för att maximera lagringen samtidigt som man minimerar antalet drag som krävs för att extrahera en given bil.
"Det finns en avvägning, " säger Mehdi Nourinejad, en nyutexaminerad doktor från Institutionen för byggnadsteknik och studiens huvudförfattare. "Om du har ett mycket stort rutnät, det leder till många omplaceringar, vilket innebär att det i genomsnitt tar längre tid att hämta ditt fordon. Å andra sidan, om du har ett antal mindre rutnät, det slösar mycket utrymme."
Nourinejad, Roorda och deras medförfattare Sina Bahrami skapade en datormodell där de kunde simulera effekterna av olika layouter för AV-parkeringsplatser. De använde sedan en algoritm för att optimera designen för olika faktorer, inklusive att minimera antalet flyttningar och maximera andelen av tomten som användes för parkering kontra körfält för omlokalisering, in eller ut.
Deras analys visade att för ett givet antal bilar, en väldesignad AV-parkering skulle kunna ta emot 62 procent fler bilar än en konventionell. Beroende på parkeringsplatsens dimensioner, i vissa fall kunde de öka kapaciteten ytterligare – fyrkantiga AV-parkeringar kunde ta upp till 87 procent fler bilar. Denna förbättrade användning av utrymme kan leda till mycket mindre fotspår på parkeringsplatsen, förutsatt att det totala antalet bilar som behöver parkera i dem förblir konstant.
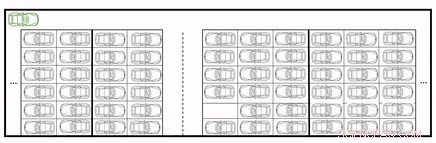
Den här animationen visar hur parkering kan fungera i partier avsedda för autonoma fordon. Bilar i de yttre raderna av rutnätet kan röra sig ur vägen för att tillåta bilar i mitten att fly. Kredit:Sina Bahrami
En annan fördel med AV-parkeringar är att designen inte är fixerad. "Om efterfrågan förändras - t.ex. om du behöver packa in fler bilar på tomten – du behöver inte måla nya parkeringsplatser, " säger Bahrami. "Istället, operatören kan bara signalera till bilarna att de ska ordna om sig själva. Det kommer att ta längre tid att hämta ditt fordon, men du får plats med fler bilar."
Roorda hoppas att kommunala parkeringsmyndigheter ska kunna använda sin designansats för att förbättra stadsrum. "Just nu, våra centrumkärnor har gigantiska kommunala parkeringsplatser intill stora attraktioner, " säger han. "AVs kan tillåta oss att både krympa och flytta dessa parkeringsplatser, öppnar upp värdefullt utrymme i städerna."
Konceptet med en AV som kör och släpper av en passagerare, att navigera till en ultraeffektiv AV-parkering och senare återvända för att hämta passageraren låter attraktivt. Men detta nya paradigm kan också införa negativa konsekvenser, som en potentiell ökning av trafikstockningar.
"Just nu, vi har många bilar på vägen med bara en passagerare, " säger Roorda. "Om vi lokaliserar AV-parkeringar för långt bort från stora attraktioner, vi kan sluta med gator fulla av fordon som har noll passagerare, vilket skulle vara värre."
En annan nackdel är att teamets design endast fungerar för parkeringsplatser som är reserverade exklusivt för AV:er, snarare än en blandning av AV:er och konventionella fordon, även om Roorda säger att ett enda parti kan ha både AV- och icke-AV-områden.
Roorda och hans team kan inte heller förutsäga när antalet AV:er på vägen kommer att nå den kritiska massan som krävs för att använda deras design.
"Vi pratar om ett stort antal fordon som helt kan köra sig själva, utan krav på att en förare ska ta över om något går fel, " säger Roorda. "Det är mycket som måste hända innan vi kommer till det stadiet."