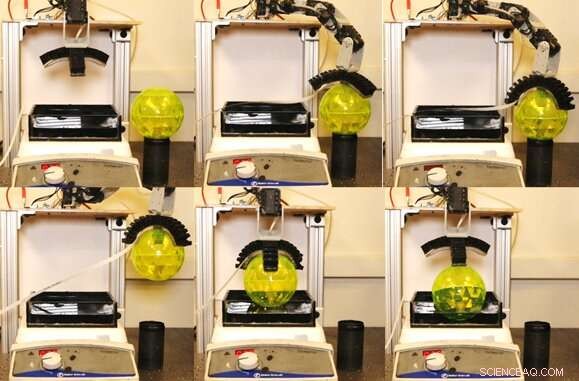
Denna robotstyrda arm använder konstruerade bakterier i brunnar i sina fingrar för att "smaka" efter en specifik kemikalie innan man bestämmer sig för om man ska ta upp bollen och lägga den i badet. Systemet har utvecklats av ingenjörer vid UC Davis och Carnegie Mellon University. Kredit:Tess Hellebrekers, Soft Machines Lab, Carnegie Mellon University
En robotgriparm som använder konstruerade bakterier för att "smaka" efter en specifik kemikalie har utvecklats av ingenjörer vid University of California, Davis, och Carnegie Mellon University. Griparen är ett proof-of-concept för biologiskt baserad mjuk robotik.
"Vår långsiktiga vision handlar om att bygga en syntetisk mikrobiota för mjuka robotar som kan hjälpa till med reparation, energigenerering eller bioavkänning av miljön, " sa Cheemeng Tan, biträdande professor i biomedicinsk teknik vid UC Davis. Verket publicerades den 26 juni i tidskriften Vetenskapsrobotik .
Mjuk robotik använder lätt, flexibla och mjuka material för att skapa maskiner som matchar mångsidigheten hos levande varelser, och mjuka robotdesigner hämtar ofta inspiration från naturen. Att lägga till faktiska levande celler till mjuka robotar tar forskare ytterligare ett steg närmare att skapa biologisk-mekaniska hybridmaskiner.
"Genom att kombinera vårt arbete inom flexibel elektronik och robothud med syntetisk biologi, vi är närmare framtida genombrott som mjuka biohybridrobotar som kan anpassa sina förmågor till avkänning, känna och röra sig som svar på förändringar i deras miljöförhållanden, sa Carmel Majidi, en medförfattare och docent i maskinteknik vid CMU.
Biosensing med konstruerade bakterier
Den nya enheten använder en biosensormodul baserad på E. coli-bakterier konstruerade för att svara på den kemiska IPTG genom att producera ett fluorescerande protein. Bakteriecellerna finns i brunnar med en flexibel, poröst membran som låter kemikalier komma in men håller cellerna inne. Denna bioavkänningsmodul är inbyggd i ytan av en flexibel gripare på en robotarm, så att griparen kan "smaka" miljön genom fingrarna.

Fluorescerande proteiner som uttrycks av bakterier på den bakteriestyrda robotgriparen. Kredit:Justus et al., Sci. Robot. 4, eaax0765 (2019)
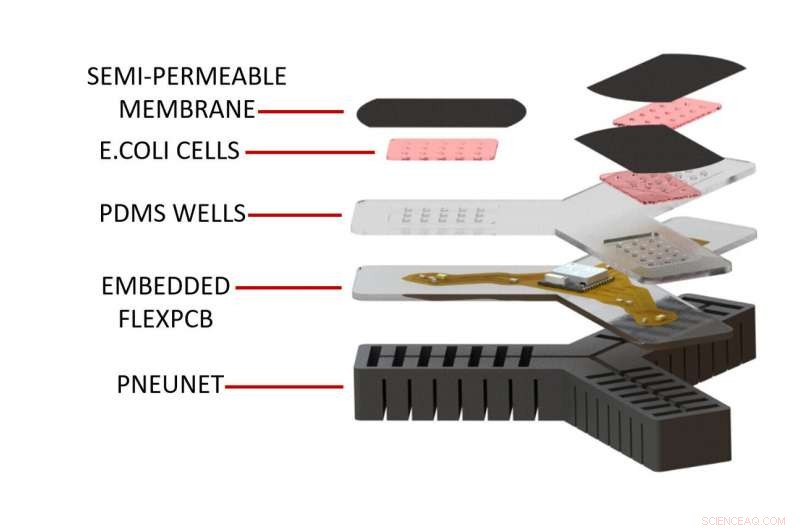
Dekonstruerad vy av den bakteriestyrda robotgriparen. Kredit:Tess Hellebrekers

Ett samarbete inom flexibel elektronik och syntetisk biologi gav denna mjuka, robotgripare. Tekniken flyttar forskarna ett steg närmare att skapa biologisk-mekaniska hybridmaskiner. Kredit:Tess Hellebrekers, Soft Machines Lab, Carnegie Mellon University
När IPTG passerar membranet in i kammaren, cellerna fluorescerar och elektroniska kretsar inuti modulen upptäcker ljuset. Den elektriska signalen går till griparens styrenhet, som kan bestämma om man ska plocka upp något eller släppa det.
Som ett test, griparen kunde kontrollera ett laboratorievattenbad för IPTG och sedan bestämma om ett föremål skulle placeras i badet eller inte.
Än så länge, den här biohybridboten kan bara smaka en sak och det är svårt att designa system som kan upptäcka ändrade koncentrationer, sa Tan. En annan utmaning är att upprätthålla en stabil population av mikrober i, eller på, en robot – jämförbar med mikrobiomet eller ekosystemet av bakterier och svampar som lever i eller på våra egna kroppar och utför många användbara funktioner för oss.
Biohybridsystem erbjuder potentiellt mer flexibilitet än konventionell robotteknik, han sa. Bakterier kan konstrueras för olika funktioner på roboten:att upptäcka kemikalier, tillverka polymerer för reparationer eller generering av energi, till exempel.














