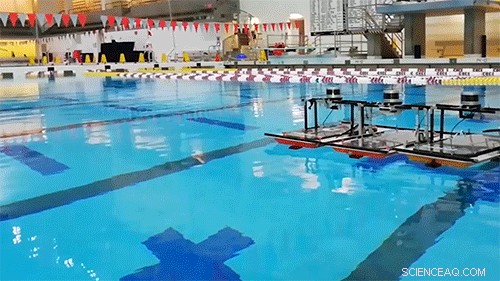
MIT:s flotta av robotbåtar har uppdaterats med nya möjligheter för att "formskifta, ” genom att autonomt koppla bort och återmontera till olika konfigurationer för att bilda olika flytande plattformar i Amsterdams kanaler. I experiment i en pool, båtarna ordnade om sig själva från en sammankopplad rak linje till ett "L" (visas här) och andra former. Kredit:Massachusetts Institute of Technology
MIT:s flotta av robotbåtar har uppdaterats med nya möjligheter för att "formskifta, "genom att autonomt koppla ur och återmontera till en mängd olika konfigurationer, att bilda flytande strukturer i Amsterdams många kanaler.
De autonoma båtarna – rektangulära skrov utrustade med sensorer, thrusters, mikrokontroller, GPS-moduler, kameror, och annan hårdvara – utvecklas som en del av det pågående "Roboat"-projektet mellan MIT och Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute). Projektet leds av MIT-professorerna Carlo Ratti, Daniela Rus, Dennis fransman, och Andrew Whittle. I framtiden, Amsterdam vill att robotbåtarna ska kryssa sina 165 slingrande kanaler, transportera varor och människor, samla skräp, eller självmontering till "pop-up"-plattformar – som broar och scener – för att hjälpa till att lindra trängseln på stadens livliga gator.
2016, MIT-forskare testade en robotprototyp som kunde gå framåt, bakåt, och i sidled längs en förprogrammerad bana i kanalerna. Förra året, forskare utformade till låg kostnad, 3D-tryckt, versioner av båtarna i kvartsskala, som var mer effektiva och smidiga, och kom utrustad med avancerade spårningsalgoritmer. I juni, de skapade en autonom spärrmekanism som låter båtarna rikta in sig på och klämma fast i varandra, och fortsätt försöka om de misslyckas.
I ett nytt dokument som presenterades vid förra veckans IEEE International Symposium on Multi-Robot and Multi-Agent Systems, forskarna beskriver en algoritm som gör att robotbåtarna smidigt kan omforma sig så effektivt som möjligt. Algoritmen hanterar all planering och spårning som gör det möjligt för grupper av roboatenheter att låsa upp från varandra i en uppsättning konfiguration, åka en kollisionsfri väg, och återanslut till deras lämpliga plats på den nya uppsättningskonfigurationen.
I demonstrationer i en MIT-pool och i datorsimuleringar, grupper av sammanlänkade robåtsenheter ordnade om sig själva från raka linjer eller kvadrater till andra konfigurationer, såsom rektanglar och "L"-former. De experimentella transformationerna tog bara några minuter. Mer komplexa formskiftningar kan ta längre tid, beroende på antalet rörliga enheter – vilket kan vara dussintals – och skillnader mellan de två formerna.
"Vi har gjort det möjligt för robotarna att nu skapa och bryta förbindelser med andra robotar, med hopp om att flytta aktiviteter på Amsterdams gator till vattnet, säger Rus, direktör för datavetenskap och artificiell intelligens Laboratory (CSAIL) och Andrew och Erna Viterbi professor i elektroteknik och datavetenskap. "En uppsättning båtar kan samlas för att bilda linjära former som popup-broar, om vi behöver skicka material eller människor från ena sidan av en kanal till den andra. Eller, vi kan skapa bredare popup-plattformar för blomster- eller matmarknader."
Med Rus på tidningen är:Ratti, chef för MIT:s Senseable City Lab, och, även från labbet, första författaren Banti Gheneti, Ryan Kelly, och Drew Meyers, alla forskare; postdoc Shinkyu Park; och forskarassistent Pietro Leoni.
Kredit:Massachusetts Institute of Technology
Kollisionsfria banor
För deras arbete, forskarna var tvungna att tackla utmaningar med autonom planering, spårning, och ansluta grupper av robåtenheter. Att ge varje enhet unika möjligheter att, till exempel, hitta varandra, komma överens om hur man bryter isär och reformerar, och sedan röra sig fritt, skulle kräva komplexa kommunikations- och kontrolltekniker som skulle kunna göra rörelser ineffektiva och långsamma.
För att möjliggöra smidigare drift, forskarna utvecklade två typer av enheter:samordnare och arbetare. En eller flera arbetare ansluter till en samordnare för att bilda en enda enhet, kallas en "ansluten fartygsplattform" (CVP). Alla koordinator- och arbetarenheter har fyra propellrar, en trådlös mikrokontroller, och flera automatiserade låsmekanismer och avkänningssystem som gör att de kan länka ihop.
koordinatorer, dock, även utrustad med GPS för navigering, och en tröghetsmätenhet (IMU), som beräknar lokalisering, utgör, och hastighet. Arbetare har bara ställdon som hjälper CVP att styra längs en väg. Varje koordinator är medveten om och kan trådlöst kommunicera med alla anslutna arbetare. Strukturer omfattar flera CVP:er, och individuella CVP:er kan haka på varandra för att bilda en större enhet.
Under formskiftning, alla anslutna CVP:er i en struktur jämför de geometriska skillnaderna mellan dess ursprungliga form och nya form. Sedan, varje CVP avgör om den stannar på samma plats och om den behöver flytta. Varje rörlig CVP tilldelas sedan en tid att demontera och en ny position i den nya formen.
Varje CVP använder en anpassad banaplaneringsteknik för att beräkna ett sätt att nå sin målposition utan avbrott, samtidigt som du optimerar rutten för hastighet. Att göra så, varje CVP förberäknar alla kollisionsfria regioner runt den rörliga CVP när den roterar och rör sig bort från en stationär.
Efter att ha förberäknat dessa kollisionsfria regioner, CVP:n hittar sedan den kortaste banan till sin slutdestination, vilket fortfarande hindrar den från att träffa den stationära enheten. I synnerhet, optimeringstekniker används för att göra hela banaplaneringsprocessen mycket effektiv, med förberäkningen som tar lite mer än 100 millisekunder att hitta och förfina säkra vägar. Med hjälp av data från GPS och IMU, koordinatorn uppskattar sedan dess ställning och hastighet vid dess masscentrum, och styr trådlöst alla propellrar för varje enhet och flyttar in på målplatsen.
I sina experiment, forskarna testade tre-enhets CVP, bestående av en samordnare och två arbetare, i flera olika formskiftande scenarier. Varje scenario involverade en CVP som frigjordes från den ursprungliga formen och flyttade och låste till en målpunkt runt en andra CVP.
Tre CVP, till exempel, ordnade om sig själva från en ansluten rak linje – där de var låsta vid sina sidor – till en rak linje ansluten fram och bak, samt ett "L." I datorsimuleringar, upp till 12 robåtenheter ordnade om sig från, säga, en rektangel till en kvadrat eller från en hel kvadrat till en Z-liknande form.
Uppskalning
Experiment utfördes på robåtsenheter i kvartsstorlek, som mäter ca 1 meter långa och en halv meter breda. Men forskarna tror att deras banaplaneringsalgoritm kommer att skalas väl för att kontrollera fullstora enheter, som kommer att mäta cirka 4 meter lång och 2 meter bred.
Om ungefär ett år, forskarna planerar att använda robåtarna för att bilda en dynamisk "bro" över en 60 meter lång kanal mellan NEMO Science Museum i Amsterdams centrum och ett område som är under utveckling. Projektet, kallas RoundAround, kommer att använda robåtar för att segla i en kontinuerlig cirkel över kanalen, plocka upp och släppa av passagerare vid hamnen och stoppa eller omdirigera när de upptäcker något i vägen. För närvarande, att gå runt den vattenvägen tar cirka 10 minuter, men bron kan minska den tiden till cirka två minuter.
"Detta kommer att bli världens första bro som består av en flotta av autonoma båtar, " säger Ratti. "En vanlig bro skulle vara superdyr, eftersom du har båtar på väg, så du skulle behöva ha en mekanisk bro som öppnar upp eller en mycket hög bro. Men vi kan koppla ihop två sidor av kanalen [genom att använda] autonoma båtar som blir dynamiska, lyhörd arkitektur som flyter på vattnet."
För att nå det målet, forskarna vidareutvecklar robotarna för att säkerställa att de säkert kan hålla människor, och är robusta för alla väderförhållanden, som kraftigt regn. De ser också till att robåtarna effektivt kan ansluta till kanalernas sidor, som kan variera mycket i struktur och design.
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.