Upphovsman:Jiang, Zhou &Gravish.
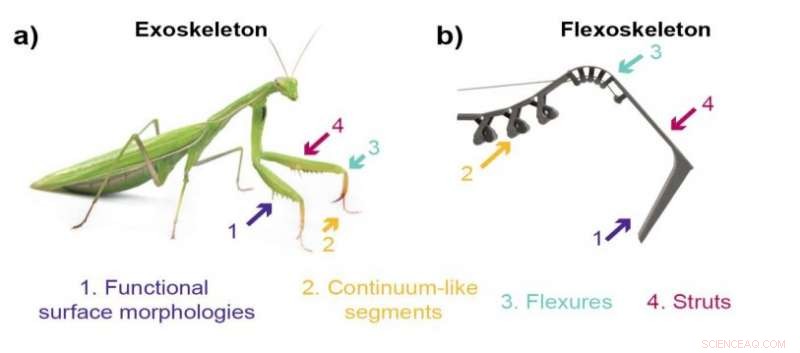
Insekter har vanligtvis en mängd komplexa exoskeletstrukturer, som stöder dem i deras rörelser och vardagliga aktiviteter. Att tillverka konstgjorda exoskelett för insektsinspirerade robotar som matchar komplexiteten hos dessa naturligt förekommande strukturer är en viktig utmaning inom robotikområdet.
Även om forskare har föreslagit flera tillverkningsprocesser och tekniker för att producera exoskeleton för insektsinspirerade robotar, många av dessa metoder är extremt komplexa eller förlitar sig på dyr utrustning och material. Detta gör dem omöjliga och svåra att tillämpa i större skala.
Med detta i åtanke, forskare vid University of California i San Diego har nyligen utvecklat en ny process för att designa och tillverka komponenter för insektsinspirerade robotar med exoskeletstrukturer. De introducerade denna process, kallad flexoskelet -utskrift, i ett papper förpublicerat på arXiv.
"Inspirerad av insekts exoskelet, vi presenterar en ny tillverkningsprocess som kallas "flexoskelet" -utskrift som möjliggör snabb och tillgänglig tillverkning av hybridstela/mjuka robotar, "skrev forskarna i sin artikel.
Än så länge, hybridrobotar med både styva och mjuka komponenter har vanligtvis byggts med dyra material och 3D-skrivare, samt gjutning och maskinprocesser i flera steg. I deras studie, forskargruppen vid UC San Diego bestämde sig för att skapa en ny tillverkningsmetod som är billigare och lättare att använda.
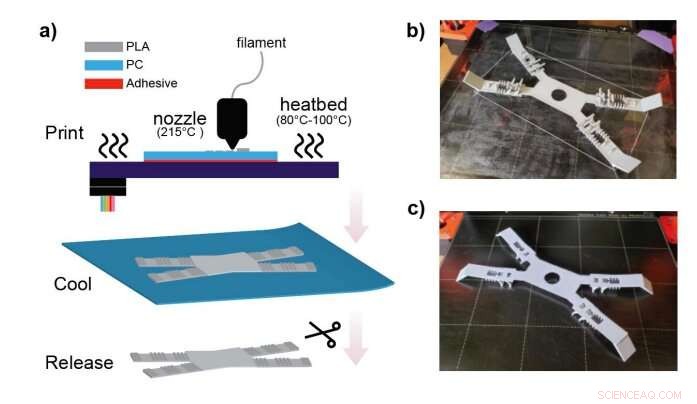
a) En figur som förklarar hur utskriftsprocessen som forskarna introducerade fungerar. b) En fyrbent robot skapad med hjälp av forskarnas metod, omedelbart efter utskrift på klart PC -lager. c) Den fyrbenta roboten efter frigöring från PC -lagret. Upphovsman:Jiang, Zhou &Gravish.
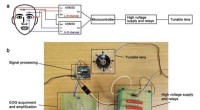
Flexoskelet -utskrift, metoden de utvecklat, förlitar sig på en anpassning av en 3D-skrivare av fuserat deponeringsmaterial av konsumentkvalitet, vilket ger en extremt stark bindningsstyrka mellan det deponerade materialet och skrivarens flexibla baslager. Denna process kan användas för att skapa exoskelett för insektsinspirerade robotar med olika former och morfologier.
Anmärkningsvärt, tillverkningssättet som forskarna föreslår kan användas av både nybörjare och experter. eftersom det är ganska enkelt och lätt att förstå. Det är också mycket billigare än alternativa tillverkningsmetoder, eftersom material och utrustning den bygger på är avsevärt billiga och lättillgängliga.
I deras studie, laget demonstrerade genomförbarheten av deras tillvägagångssätt genom att använda det för att designa och testa en mängd olika kanoniska flexoskeletelement. De kombinerade sedan alla element som de producerade till en gående fyrbent robot med en flexibel exoskeletstruktur.
"Det tillvägagångssätt som vi har utvecklat är starkt beroende av förhållandena mellan tredimensionell geometri av ytfunktioner och deras bidrag till de lokala mekaniska egenskaperna hos den komponenten, "forskarna skrev i sin artikel." Vi föreställer oss att denna metod kommer att möjliggöra en ny klass av bioinspirerade robotar med fokus på sambandet mellan mekanisk design och rörelse. "
I framtiden, den nya design- och tillverkningsprocessen som utvecklats av detta forskargrupp kan möjliggöra utveckling av många insektsinspirerade robotar. Eftersom tekniken är mycket mer enkel och prisvärd än de flesta befintliga metoder, det kan också göra befintliga eller nya robotar lättare att skala upp, öka deras chanser att produceras i större mängder och visas på marknaden.
© 2019 Science X Network