En självkörande bil beger sig in i skogen. Kredit:Matthew Doude, CC BY-ND
Autonoma fordon kan följa de allmänna reglerna för amerikanska vägar, känna igen trafiksignaler och körfältsmarkeringar, lägga märke till övergångsställen och andra vanliga inslag på gatorna. Men de fungerar bara på väl markerade vägar som är noggrant skannade och kartlagda i förväg.
Många asfalterade vägar, fastän, har blekt färg, skyltar skyltade bakom träd och ovanliga korsningar. Dessutom, 1,4 miljoner miles av amerikanska vägar – en tredjedel av landets allmänna vägar – är obanade, utan vägsignaler som körfältsmarkeringar eller stopp-här-linjer. Det inkluderar inte miles av privata vägar, oasfalterade uppfarter eller terrängstigar.
Vad ska en autonom bil som följer regeln göra när reglerna är oklara eller obefintliga? Och vad ska dess passagerare göra när de upptäcker att deras fordon inte kan ta dem dit de ska?
Redovisning för det dunkla
De flesta utmaningarna med att utveckla avancerad teknik innebär att hantera sällsynta eller ovanliga situationer, eller händelser som kräver prestanda utöver ett systems normala kapacitet. Det är definitivt sant för autonoma fordon. Några exempel på väg kan vara att navigera i byggzoner, möter en häst och vagn, eller se graffiti som ser ut som en stoppskylt. Av vägen, möjligheterna inkluderar den fulla variationen av den naturliga världen, som träd nere över vägen, översvämningar och stora vattenpölar – eller till och med djur som blockerar vägen.

Simulerad öken, ängs- och skogsmiljöer genererade av Mississippi State University Autonomous Vehicle Simulator. Kredit:Chris Goodin, Mississippi State University, Författare tillhandahålls
Vid Mississippi State Universitys Center for Advanced Vehicular Systems, vi har antagit utmaningen att träna algoritmer för att svara på omständigheter som nästan aldrig inträffar, är svåra att förutse och är komplexa att skapa. Vi strävar efter att sätta autonoma bilar i det svåraste möjliga scenariot:att köra i ett område som bilen inte har några förkunskaper om, utan pålitlig infrastruktur som vägfärg och trafikskyltar, och i en okänd miljö där det är lika troligt att se en kaktus som en isbjörn.
Vårt arbete kombinerar virtuell teknik och den verkliga världen. Vi skapar avancerade simuleringar av verklighetstrogna utomhusscener, som vi använder för att träna artificiell intelligens algoritmer för att ta ett kameraflöde och klassificera vad den ser, märkning av träd, himmel, öppna vägar och potentiella hinder. Sedan överför vi dessa algoritmer till ett specialbyggt fyrhjulsdrivet testfordon och skickar ut det på vår dedikerade terrängtestbana, där vi kan se hur våra algoritmer fungerar och samla in mer data för att mata in i våra simuleringar.
Startar virtuellt
Vi har utvecklat en simulator som kan skapa ett brett utbud av realistiska utomhusscener för fordon att navigera genom. Systemet genererar en rad landskap av olika klimat, som skogar och öknar, och kan visa hur växter, buskar och träd växer med tiden. Det kan också simulera väderförändringar, solljus och månsken, och de exakta platserna för 9, 000 stjärnor.

En vägspolning, som sett i verkligheten, vänster, och i simulering. Kredit:Chris Goodin, Mississippi State University, Författare tillhandahålls
Systemet simulerar också avläsningarna av sensorer som vanligtvis används i autonoma fordon, såsom lidar och kameror. Dessa virtuella sensorer samlar in data som matas in i neurala nätverk som värdefull träningsdata.
Bygger en testbana
Simuleringar är bara så bra som deras skildringar av den verkliga världen. Mississippi State University har köpt 50 hektar mark där vi utvecklar en testbana för off-road autonoma fordon. Fastigheten är utmärkt för terrängprovning, med ovanligt branta lutningar för vårt område i Mississippi – upp till 60 procent lutningar – och en mycket mångsidig växtpopulation.
Vi har valt vissa naturliga egenskaper i detta land som vi förväntar oss kommer att vara särskilt utmanande för självkörande fordon, och replikerade dem exakt i vår simulator. Det gör att vi direkt kan jämföra resultat från simuleringen och verkliga försök att navigera i det faktiska landet. Så småningom, vi kommer att skapa liknande verkliga och virtuella parningar av andra typer av landskap för att förbättra vårt fordons kapacitet.

Halo Project-bilen kan samla in data om körning och navigering i oländig terräng. Kredit:Beth Newman Wynn, Mississippi State University, Författare tillhandahålls
Samlar in mer data
Vi har även byggt ett testfordon, kallas Halo Project, som har en elmotor och sensorer och datorer som kan navigera i olika terrängmiljöer. Halo Project-bilen har ytterligare sensorer för att samla in detaljerad information om dess faktiska omgivning, som kan hjälpa oss att bygga virtuella miljöer att köra nya tester i.
Två av dess lidarsensorer, till exempel, är monterade i korsande vinklar på framsidan av bilen så att deras strålar sveper över marken som närmar sig. Tillsammans, de kan ge information om hur grov eller slät ytan är, samt fånga avläsningar från gräs och andra växter och föremål på marken.
Vi har sett några spännande tidiga resultat från vår forskning. Till exempel, vi har visat lovande preliminära resultat att maskininlärningsalgoritmer tränade i simulerade miljöer kan vara användbara i den verkliga världen. Som med de flesta autonoma fordonsforskningar, det är fortfarande en lång väg kvar, men vår förhoppning är att de teknologier vi utvecklar för extrema fall också kommer att bidra till att göra autonoma fordon mer funktionella på dagens vägar.
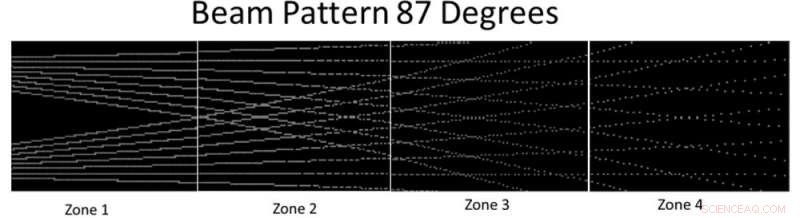
Lidar beams intersect, scanning the ground in front of the vehicle. Credit:Chris Goodin, Mississippi State University, Författare tillhandahålls
Den här artikeln är återpublicerad från The Conversation under en Creative Commons-licens. Läs originalartikeln.