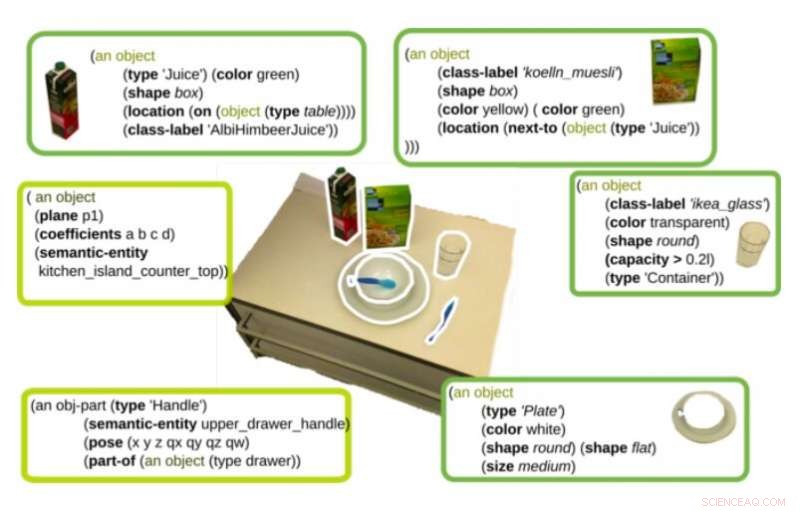
En semantiskt rik beskrivning av en frukostscen. Upphovsman:Bálint-Benczédi et al.
Under det senaste decenniet eller så, framsteg inom maskininlärning har möjliggjort utveckling av system som blir alltmer autonoma, inklusive självkörande fordon, virtuella assistenter och mobila robotar. Bland annat, forskare som utvecklar autonoma system måste identifiera sätt att integrera komponenter som är utformade för att hantera olika men ändå kompletterande deluppgifter.
Till exempel, en robot som utför manuella uppgifter i en mänsklig användares hem ska kunna känna av objekt i sin omgivning samtidigt som den hämtar information om dessa objekt som sedan kan användas för att planera dess rörelser och handlingar. Denna process, även känd som "perception-cognition-action" -paradigmet, är av avgörande betydelse, eftersom det i slutändan tillåter roboten att komma med användbara strategier och effektivt slutföra uppgifter.
Än så länge, de flesta metoder för att implementera detta perception-cognition-action paradigm i robotar behandlar dessa tre uppgifter som nästan helt oberoende moduler som fungerar som svarta lådor för varandra. Ett team av forskare vid universitetet i Bremen och universitetet i München i Tyskland, dock, tror att länka en robots "uppfattning" -system till dess kognition (dvs. dess förmåga att "resonera" eller hämta information om objekt i den omgivande miljön) kan avsevärt förbättra dess totala prestanda.
Med detta i åtanke, forskarna utvecklade nyligen ett kognitivt uppfattningssystem som kan förbättra prestanda för mobila robotar i vardagliga manipulationsuppgifter. Detta system, kallad ROBOSHERLOCK, uppnår uppfattning via content analytics (CA), en strategi som innebär användning av statistiska metoder för att analysera stora mängder data.
De data som analyseras av ROBOSHERLOCK är "ostrukturerade, "eftersom dess struktur inte återspeglar den semantik som är förknippad med den, som det skulle i en databas eller kalkylblad. Systemet använder alltså en strategi som kallas ostrukturerad informationshantering (UIM), vilket i huvudsak innebär att den kan bearbeta stora mängder ostrukturerade data (t.ex. textdokument, ljudfiler, bilder, etc.) med användning av en uppsättning algoritmer för extraktion av information. Var och en av dessa algoritmer extraherar olika typer av kunskap beroende på dess "expertis, "och de klassificeras och kombineras sedan för att nå ett enda konsekvent beslut.
"I ROBOSHERLOCK, uppfattning och tolkning av realistiska scener formuleras som ett ostrukturerat informationshanteringsproblem (UIM), "forskarna skrev i sin uppsats." Tillämpningen av UIM-principen stöder implementering av uppfattningssystem som kan svara på uppgiftsrelevanta frågor om objekt i en scen, öka prestandan för objektigenkänning genom att kombinera styrkorna hos flera uppfattningsalgoritmer, stödja kunskapsaktiverade resonemang om objekt och möjliggöra automatisk och kunskapsdriven generation av processrörledningar. "
Forskarna utvärderade sin ram i en serie tester, tillämpa den på olika system för verklig scenuppfattning. De fann att "resonemang" om (dvs. bearbetning) bakgrundskunskapen som hämtas från dess algoritmer gör att ROBOSHERLOCK kan svara på en mängd olika frågor, att gå utöver var direkt uppfattbart i den omgivande miljön.
Komponenterna i ROBOSHERLOCK som forskarna presenterade i sin senaste studie kan ses som dess kärnfunktioner. Senare, forskarna har också utvecklat flera tillägg som förbättrar systemets kognitiva kapacitet. Till exempel, de skapade en förlängning som gör att systemet kan upptäcka människor och föremål samtidigt, resonemang om de handlingar som människorna utför och avsikterna bakom dessa handlingar.
"På senare tid, vi har undersökt hur ROBOSHERLOCK -ramverket kan göra det möjligt för agenterna att "drömma" och att använda toppmoderna spelmotorer genererar variationer av en uppgift och lär sig nya uppfattningsmodeller, "skrev forskarna i sitt papper." Alla dessa tillägg ser på robotuppfattning ur perspektivet av en robot som utför uppgifter, vilket inte skulle ha varit möjligt utan kärnramen som presenteras här. "
© 2019 Science X Network